キャリブレーションのタイプ、方式、使用シーン¶
本節では、キャリブレーションのタイプや方式、使用シーンについて説明します。
キャリブレーションのタイプ¶
カメラの取り付け方式によって以下の二つのタイプに分けられます。
ETH (Eye To Hand) :カメラ光学中心とロボットベース座標との位置姿勢の相対関係をキャリブレーションします。
EIH (Eye In Hand) :カメラ光学中心とロボットフランジとの位置姿勢の相対関係をキャリブレーションします。
注意
ETHを使用する場合、ロボットベース座標またはカメラの位置が変わったら、外部パラメータはそれとともに変わるのであたらめてキャリブレーションを行います。
ETHを使用する場合、ロボットベース座標またはカメラの位置が変わったら、外部パラメータはそれとともに変わるのであたらめてキャリブレーションを行います。
ロボットをビジョンシステムに接続するかどうかによって以下の二つのタイプに分けられます。
自動キャリブレーション(推奨) :ロボットをビジョンシステムに接続し、ビジョンシステムによる制御でロボットが計画した経路に沿って画像をキャプチャして特徴点を取得します。
手動キャリブレーション :ロボットをビジョンシステムに接続できない場合、ティーチペンダントを使用してロボットを移動させ、画像をキャプチャして特徴点を取得して手動でロボット位置姿勢を入力します。
キャリブレーションの方式¶
キャリブレーションの方式とは、ハンド・アイ・キャリブレーションを実行するときにキャリブレーションポイントを追加する方式を指します。Mech-Visionでは、二つの方式が利用可能です。
ランダムな複数キャリブレーションボード位置姿勢(推奨)
ソフトウェアで自動的に生成された経路点(並進量をキャリブレーションするための径路と回転量をキャリブレーションするための経路)または手動で追加した複数の位置姿勢を使用し、各経路の経路点で画像をキャプチャしてキャリブレーションボードのコーナーを認識してからキャリブレーションポイントの列を生成します。それによってキャリブレーションボード、カメラ、ロボットの三者関係を確立します。この方式の操作が簡単で高い精度も実現できます。6軸または4軸ロボットに適用されます。
TCPタッチ方式
三点法を使用してキャリブレーションボードの位置姿勢を確認してから、キャリブレーションボード、カメラ、ロボットの三者関係を確立します。この方式は、ロボット稼働スペースが狭く、キャリブレーションボードを取り付けられない場合に適します。5軸とその他のロボットに適用されます。
ちなみに
現場では、カメラの取り付け方式、ロボットのタイプ、稼働スペースなどに応じて方式を選択してください。
使用シーン¶
ここではキャリブレーションを実行するシーンと原理について説明します。
ランダムな複数キャリブレーションボード位置姿勢を使用するETHキャリブレーション¶

図1 キャリブレーションボードの位置(ランダムな複数キャリブレーションボード位置姿勢を使用するETH方式)¶
フランジを介して寸法が確認されたキャリブレーションボードをロボットエンドに取り付けて、キャリブレーションボードの各ドットがロボットベース座標に対する座標Aを取得します。カメラでキャリブレーションボードの各ドットの画像をキャプチャして、カメラ光学中心がキャリブレーションボードの各ドットに対する座標Bを取得します。カメラ光学中心とロボットベース座標との位置姿勢関係Xをとします。A、B、Xは方程式になり、Xを求められます。キャリブレーションボードとフランジ位置との位置関係Cは未知で、キャリブレーションボードを移動させて異なる数値を取得してCを求め、さらにAを求められます。ロボットを移動させてキャリブレーションボードがカメラに対する位置姿勢を何回も変更して複数の方程式を得ます。これらの方程式の値をフィッティング計算して最適なX値を得ます。位置姿勢の関係は下図に示します。
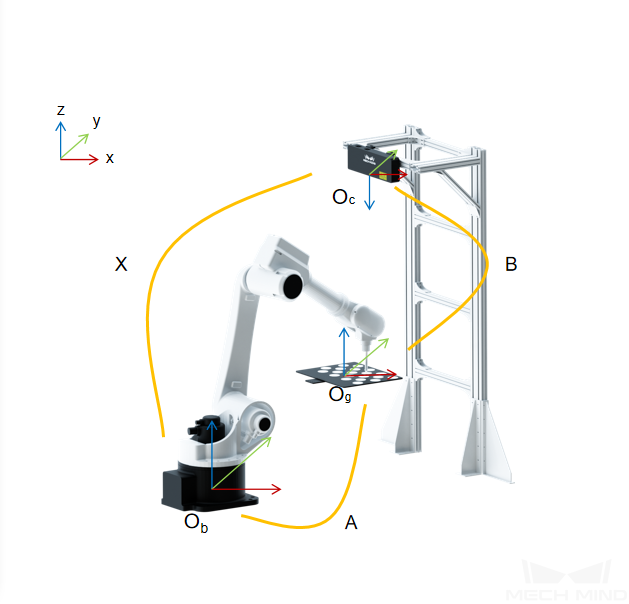
図2 ランダムな複数キャリブレーションボード位置姿勢を使用するETHキャリブレーション¶
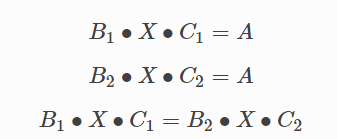
図3 カメラ座標系とロボット座標系の対応関係を計算する公式¶
ランダムな複数キャリブレーションボード位置姿勢を使用するEIHキャリブレーション¶

図4 キャリブレーションボードの位置(ランダムな複数キャリブレーションボード位置姿勢を使用するEIH方式)¶
フィクスチャを使用してカメラをロボットエンドに固定します。この場合、ロボットエンドフランジの中心はカメラ光学中心との位置姿勢関係は固定されます。それは、下図の未知変数Xです。ロボットのベース座標系に対するエンドフランジ中心の位置姿勢は、既知変数Bとします。カメラはキャリブレーションボードの画像をキャプチャし、カメラの光学中心とキャリブレーションボード上の各ドットとの位置姿勢の関係を取得し、既知変数Cを取得します。キャリブレーションボードは、カメラの視野内に平らに置かれて、ロボットのベース座標に対する相対位置姿勢は、固定値Aとします。このように、変数A、B、C、Xは方程式になります。以下の方程式には、 Aが定数値なので、最初の2つの方程式から得た新しい方程式では、Xだけが未知数です。ロボットエンドの位置姿勢を変更して、さまざまな角度から画像をキャプチャすることにより、複数セットのA、B、Cの値を取得します。それらを使用してフィッティング計算してXの最適値を取得します。
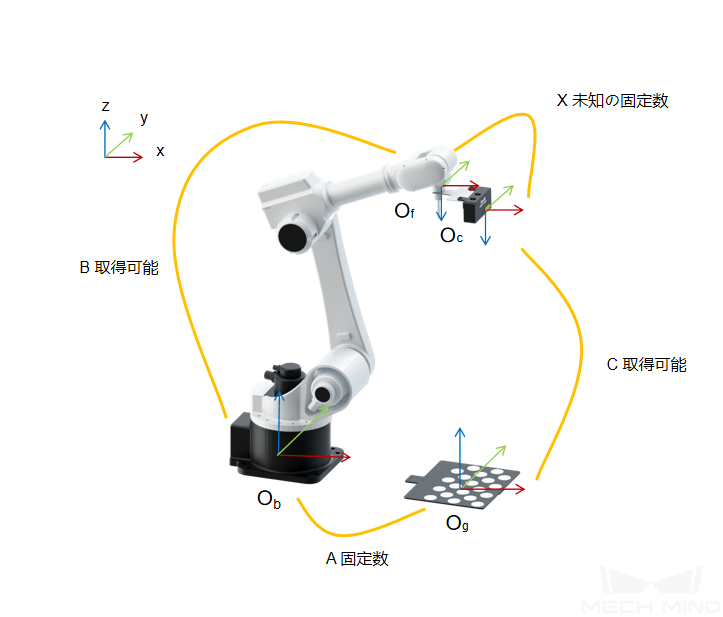
図5 ランダムな複数キャリブレーションボード位置姿勢を使用するEIHキャリブレーション¶
カメラ座標系とロボット座標系の対応関係を計算する公式について、図3をご参照ください。
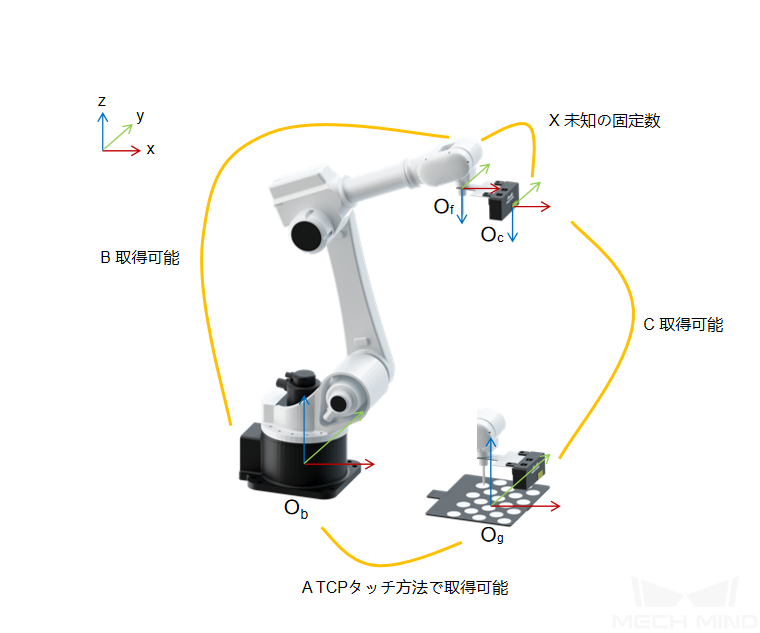
TCPタッチ方法を使用するETHキャリブレーション¶

図6 キャリブレーションボードの位置(ランダムな複数キャリブレーションボード位置姿勢を使用するETH方式)¶
TCPタッチ方法を使用する場合、キャリブレーションボードを作業テーブルに配置し、寸法が確認されたタッチポイントをロボットエンドに取り付けてキャリブレーションボードにタッチさせます。原理は下図に示すように、AとBは既知でXを求めます。キャリブレーションボードとロボットエンドを固定にせず、TCP座標が確認された先端をドットにタッチさせてAを求めます。
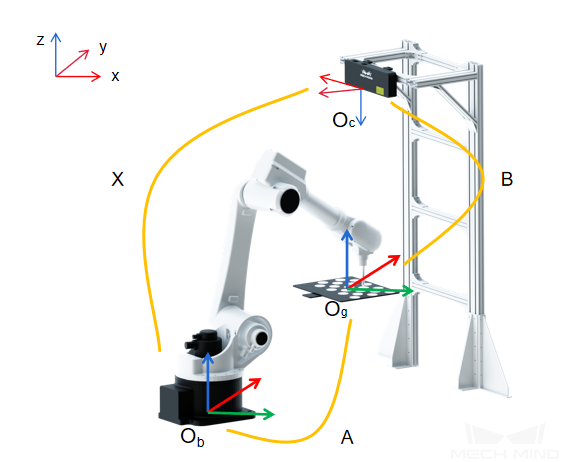
図7 TCPタッチ方法を使用するETHキャリブレーション¶
カメラ座標系とロボット座標系の対応関係を計算する公式について、図3をご参照ください。