手動キャリブレーションの実行手順¶
本節で、ロボットをMech-Mindビジョンシステムに接続できない場合に手動キャリブレーションの実行手順を紹介します。
ちなみに
実行する前に、以下のロボット情報を入手してくだい。
軸数:4軸、5軸、6軸またはその他のロボット。軸数によってキャリブレーションの実行手順はやや異なります。
オイラー角のタイプの設定:手動キャリブレーションを実行するには、オイラー角のタイプを設定する必要があります。
キャリブレーションのプリセット¶
Mech-Visionを起動して、ツールバーで カメラキャリブレーション(標準モード) をクリックして カメラのプリセット ウィンドウが表示されます。
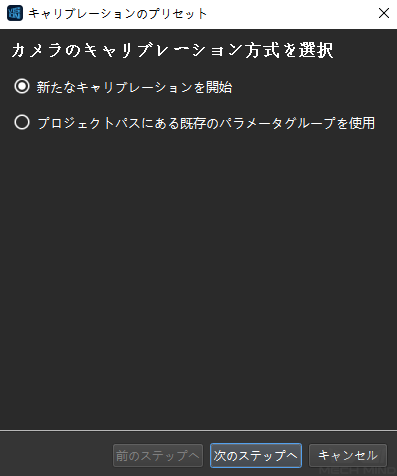
カメラのキャリブレーション方式を選択 ウィンドウで、新たなキャリブレーションを開始 を選択して 次のステップへ をクリックします。
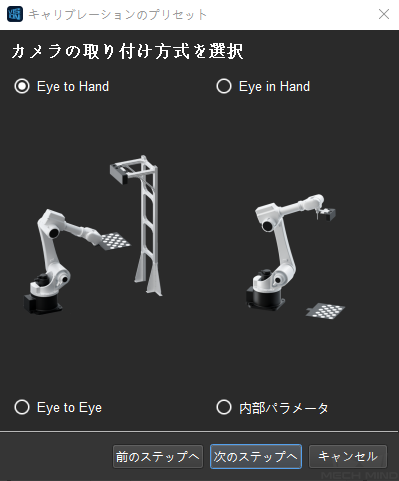
カメラの取り付け方式を選択 ウィンドウで、Eye to Hand または Eye in Hand を選択して 次のステップへ をクリックします。
ロボットのキャリブレーション方式 ウィンドウでロボットのタイプを選択して 次のステップへ をクリックします。

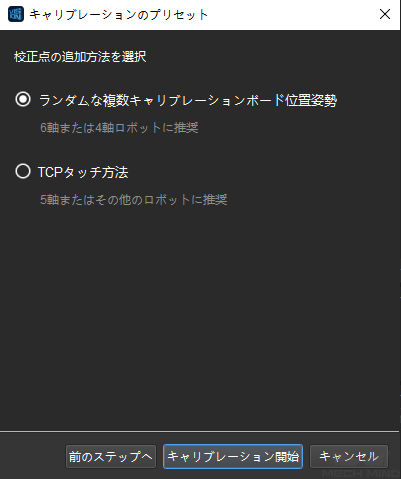
キャリブレーションポイントの追加方法を選択 ウィンドウで ランダムな複数キャリブレーションボード位置姿勢 または TCPタッチ方法 を選択して キャリブレーション開始 をクリックします。
ここでプリセットが完了し、キャリブレーションを実行することになります。
キャリブレーションのプロセス¶
自動キャリブレーションと比べれば、手動キャリブレーションのプロセスはやや異なります。
ランダムな複数キャリブレーションボード位置姿勢を使用するETHキャリブレーション¶
キャリブレーションボードの取り付け¶
詳細については、 キャリブレーションボードの取り付け をご参照ください。
カメラ内部パラメータをチェック¶
詳細については、 カメラ内部パラメータのチェック をご参照ください。
オイラー角のタイプを設定¶
オイラー角タイプが既知の場合、 既知のオイラー角のタイプ をチェックして、ドロップダウンメニューから対応するオイラー角タイプを選択します。
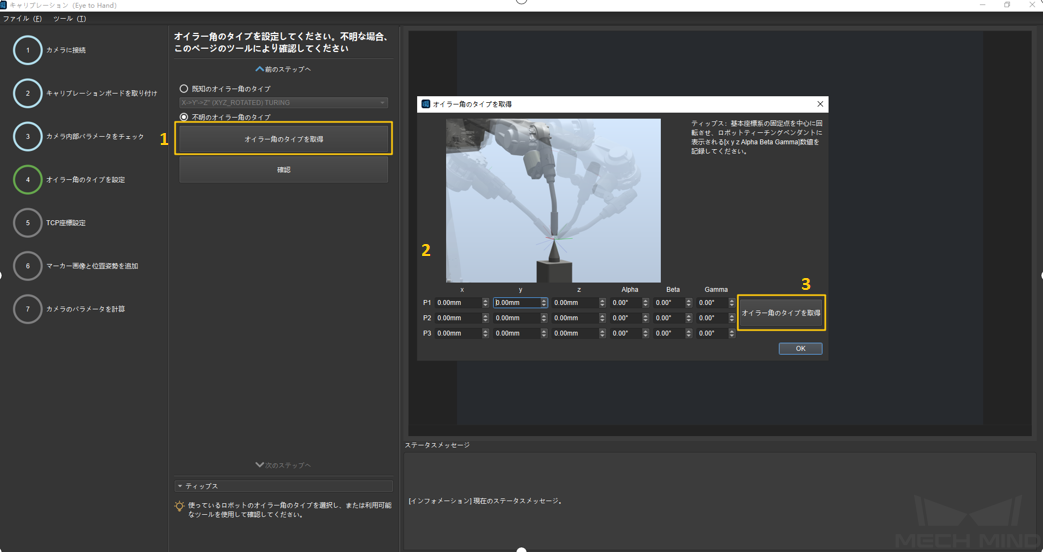
下図に示すように、オイラー角タイプが不明です。
不明のオイラー角のタイプ をチェックし、 オイラー角のタイプを取得 をクリックします。
ロボットの作業エリアに固定のタッチポイントを取り付け、ロボットがこのポイントを中心に回転するようにティーチングし、大きく異なる3つの位置姿勢をポップアップウィンドウに記録します。
オイラー角のタイプを取得 をクリックし、ソフトウェアでは現在ロボットのオイラー角タイプが計算されます。
カメラパラメータを計算¶
詳細については、 カメラのパラメータを計算 をご参照ください。
カメラパラメータを変更¶
詳細については、 カメラパラメータを変更 をご参照ください。
ランダムな複数キャリブレーションボード位置姿勢を使用するEIHキャリブレーション¶
キャリブレーションボードの取り付け¶
詳細については、 キャリブレーションボードの取り付け をご参照ください。
カメラ内部パラメータをチェック¶
詳細については、 カメラ内部パラメータのチェック をご参照ください。
オイラー角のタイプを設定¶
詳細については、 オイラー角のタイプを設定 をご参照ください。
キャリブレーション画像と位置姿勢の追加¶
詳細については、 キャリブレーション画像と位置姿勢の追加 をご参照ください。
カメラパラメータを計算¶
詳細については、 カメラのパラメータを計算 をご参照ください。
カメラパラメータを変更¶
詳細については、 カメラパラメータを変更(一部のロボットのみ) をご参照ください。
TCPタッチ方法を使用するETHキャリブレーションボード¶
キャリブレーションボードの取り付け¶
詳細については、 キャリブレーションボードの取り付け をご参照ください。
カメラ内部パラメータをチェック¶
詳細については、 カメラ内部パラメータをチェック をご参照ください。
オイラー角のタイプを設定¶
詳細については、 オイラー角のタイプを設定 をご参照ください。
キャリブレーション画像と位置姿勢の追加¶
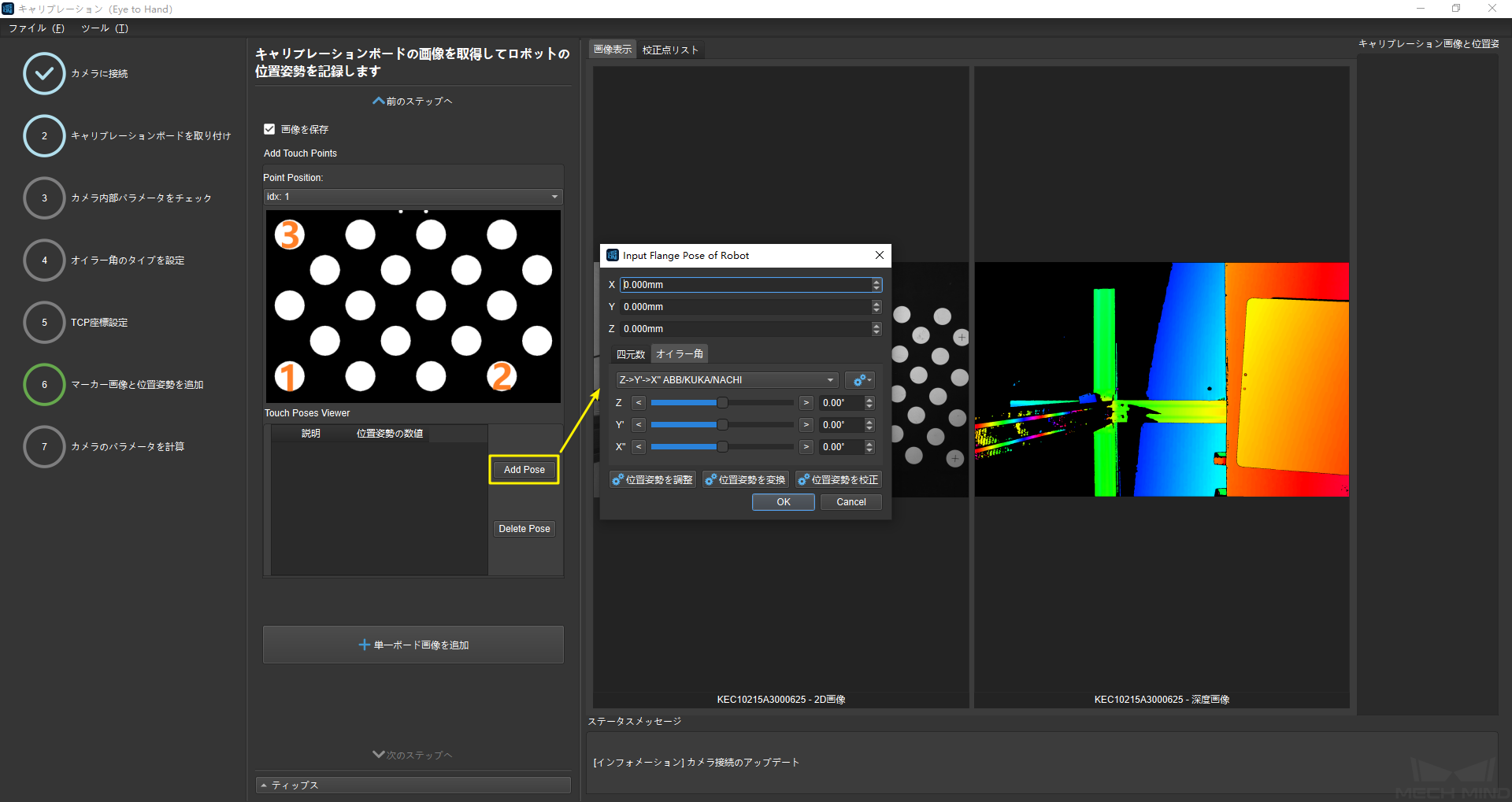
下図に示すように、ロボットエンドのタッチポイントをキャリブレーションボードのポイント1、2、3を順番にタッチさせます。タッチするごとに 位置姿勢を追加 ボタンをクリックして、ポップアップウィンドウにロボットの現在の位置姿勢を入力します。
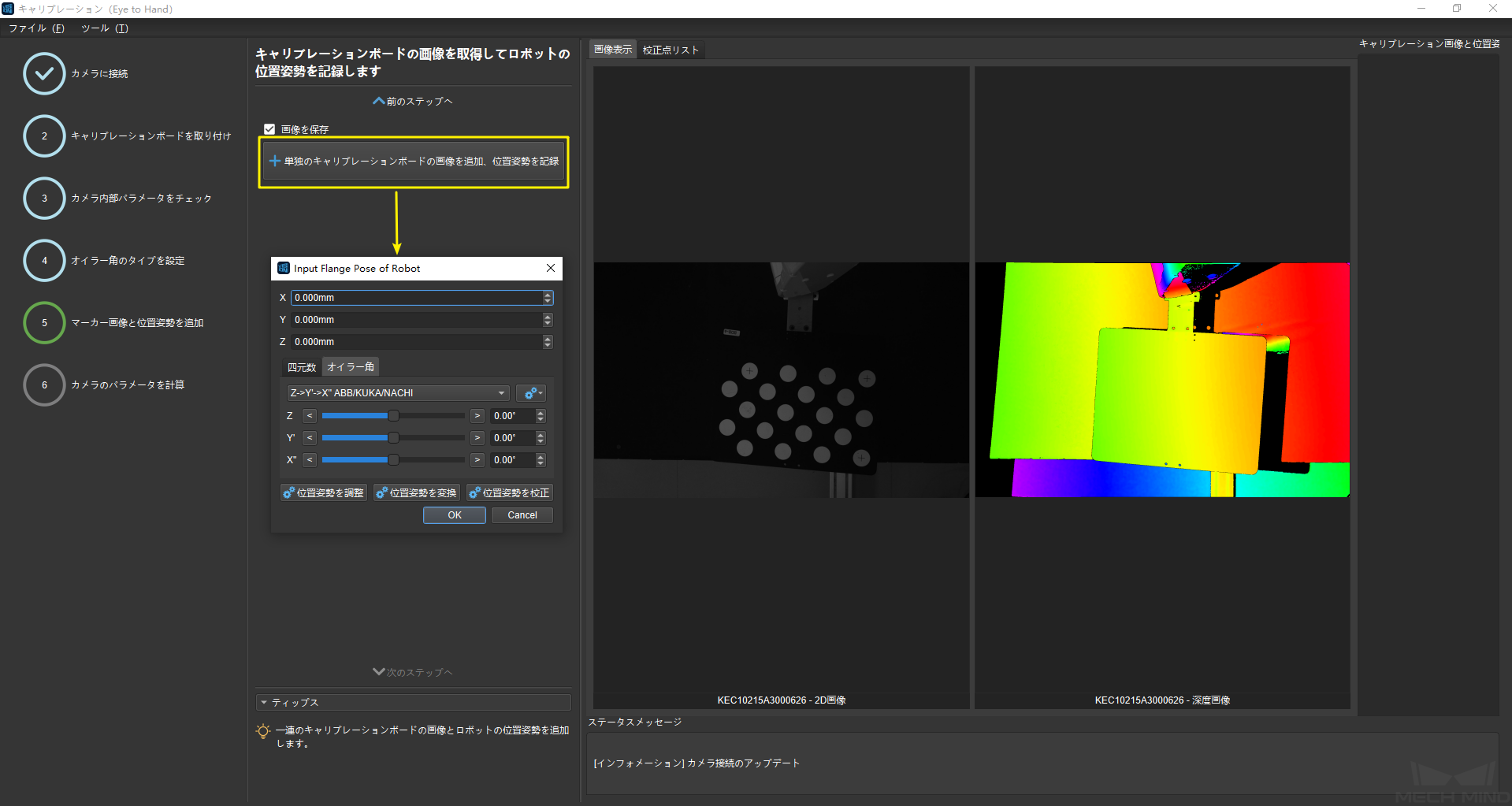
カメラがキャリブレーションボードを完全にキャプチャできるようにロボットを動かし、 単独のキャリブレーションボードの画像を追加、位置姿勢を記録 をクリックして、カメラがキャプチャした後、キャリブレーションボードのドットを認識できます。EIH方式を使う場合、ポップアップウィンドウに現在のロボット位置姿勢を入力する必要もあります。
その後、 次のステップへ をクリックして、キャリブレーションポイントの位置姿勢を追加します。
注意
キャリブレーション中に、キャリブレーションボードを固定して動かさないでください。
カメラパラメータを計算¶
詳細については、 カメラパラメータを計算 をご参照ください。
カメラパラメータを変更¶
詳細については、 カメラパラメータを変更 をご参照ください。
TCPタッチ方法を使用するEIHキャリブレーションボード¶
キャリブレーションボードの取り付け¶
詳細については、 キャリブレーションボードの取り付け をご参照ください。
カメラ内部パラメータをチェック¶
詳細については、 カメラ内部パラメータをチェック をご参照ください。
オイラー角のタイプを設定¶
詳細については、 オイラー角のタイプを設定 をご参照ください。
キャリブレーション画像と位置姿勢の追加¶
詳細については、 キャリブレーション画像と位置姿勢の追加 をご参照ください。
カメラパラメータを計算¶
詳細については、 カメラパラメータを計算 をご参照ください。
カメラパラメータを変更¶
詳細については、 カメラパラメータを変更 をご参照ください。