Basic Move Parameters¶
Basic Move parameters of move-type Taks are used to set the velocity and move type for the robot when it moves to the target.
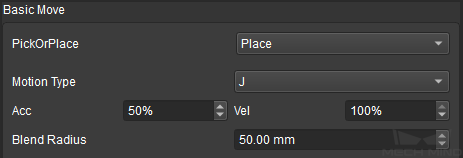
- Move Target Type
- J: Joint motion, which guides the robot to move in a curved path. It is less likely to reach singularities in the path for joint motion. This motion type is applicable to scenarios where the requirement of path accuracy is not strict and the robot moves in a large space.L: Linear motion, which guides the robot to move linearly. This motion type is applicable to scenarios where there is a strict requirement of the path accuracy, such as welding, gluing, and certain types of picking.
- Acc (Acceleration) & Vel (Velocity)
- Default setting: The default acceleration is set to 50%, and the default velocity is set to 100%.Instruction: The acceleration and velocity specify the cycle time of the robot. The acceleration value is usually set below the velocity, or else the robot may not move steadily.
Attention
The velocities of visual_move and its prior and subsequent Steps should be relatively low to make sure that the objects can be picked steadily.
- Blend Radius
- Default setting: 50.00mmDefinition: The blend radius refer to the distance between the target and the point where the robot starts to turn. The larger the blend radius, the more smoother the robot motion transitions are.Instruction: Usually, the default setting can be used. If the robot moves in a relatively small space, please set the blend radius to a smaller value. If the robot moves in a relatively large space without obstacles and the distance between two consecutive path segments are long, please set the blend radius to a larger value.
- PickOrPlace
- Default setting: UnspecifiedPick: Please select this option when the move-type Tasks is before visual_move.Place: Please select this option when the move-type Tasks is after visual_move.Instruction: The pick-or-place setting can be used to check the logic of the Mech-Viz project. Please set the corresponding move-type Task to Pick or Place based on the execution logic and make sure that the Place Task follows after the Pick Task.