大尺寸非平面工件¶

大型曲面工件上料场景中,所处理的工件往往数量相对较少、体积相对较大、曲面特征相对较明显。 对于此类场景,通过软件的3D匹配算法,即可获取工件的抓取位姿。
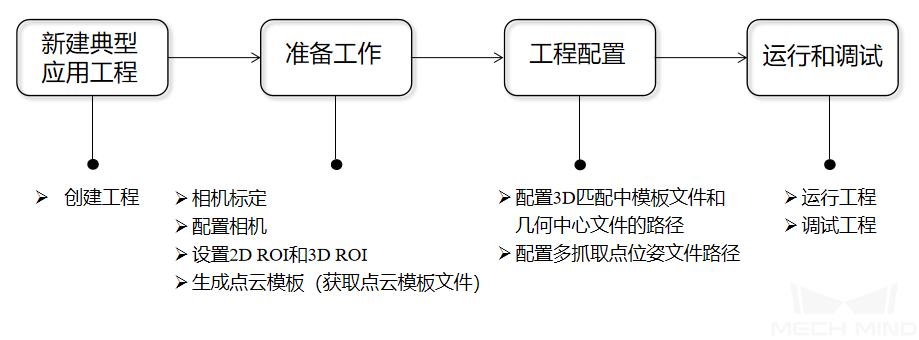
本工程的基本流程如下图所示:
新建典型应用工程¶
创建工程¶
点击界面上方菜单栏中 进入如下界面;或者点击工具栏中的 新建典型应用工程 也可进入如下界面。
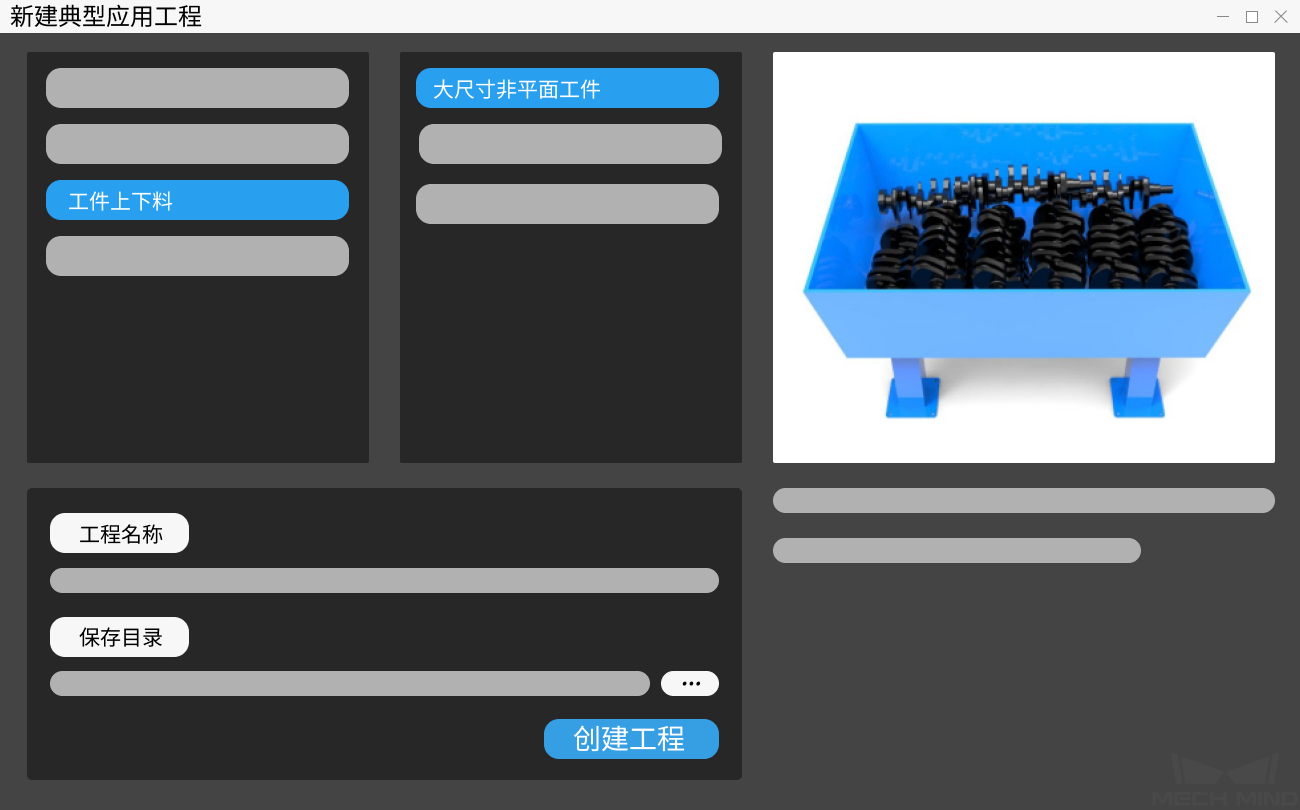
选择 大尺寸非平面工件 。
输入自定义工程名称。
点击
 选择工程文件夹的保存路径(建议用户创建空文件夹),然后点击 创建工程 。
选择工程文件夹的保存路径(建议用户创建空文件夹),然后点击 创建工程 。
准备工作¶
1. 相机标定¶
相机标定的目的是生成相机的参数文件,用于确定机器人与相机的位置关系。
点击工具栏中的 相机标定(标准) 进行相机标定。

也可点击 进行相机标定。

如有疑问,请参考 相机标定标准模式 。
3. 设置2D ROI和3D ROI¶
双击工程中 点云预处理 步骤组合进入下一层级,然后分别点击 将深度图转换为点云 和 提取3D ROI内点云 步骤设置2D ROI和3D ROI。
如下图所示,设置2D ROI的目的是为了缩小图像感兴趣区域,以免生成不必要的点云,从而提升运行速度。

如下图所示,设置3D ROI的目的是设置3D空间的感兴趣区域,提取原始点云中的目标物体点云,并忽略背景点云和干扰点云。
详细步骤可参考 设置ROI 完成2D ROI和3D ROI的设置。
4. 生成点云模板¶
使用 匹配模板与抓取点编辑器 生成目标物体的点云模板,以便工程运行时将识别出的物体点云与该模板进行比较,生成实际的抓取位姿。
通过匹配模板与抓取点编辑器生成的点云模板和抓取点如下图所示:

图中①为生成的大型曲面工件点云模板,②为降采样结果,③为添加的抓取点。
生成的模板文件将保存在工程文件夹中。
工程配置¶
工程配置的任务是在各步骤模块中设置相关属性,将上一阶段获得的配置文件添加到对应步骤中,进行工程配置,为运行工程做准备。
1. 配置3D匹配中模板文件和几何中心文件的路径¶
双击 3D匹配 步骤进入下一层级。
在此层级中点击 3D粗匹配 ,点击界面右下角参数列表的模板以及抓取点设置中出现的选择按钮
 添加模板文件和几何中心文件,如下图所示:
添加模板文件和几何中心文件,如下图所示:
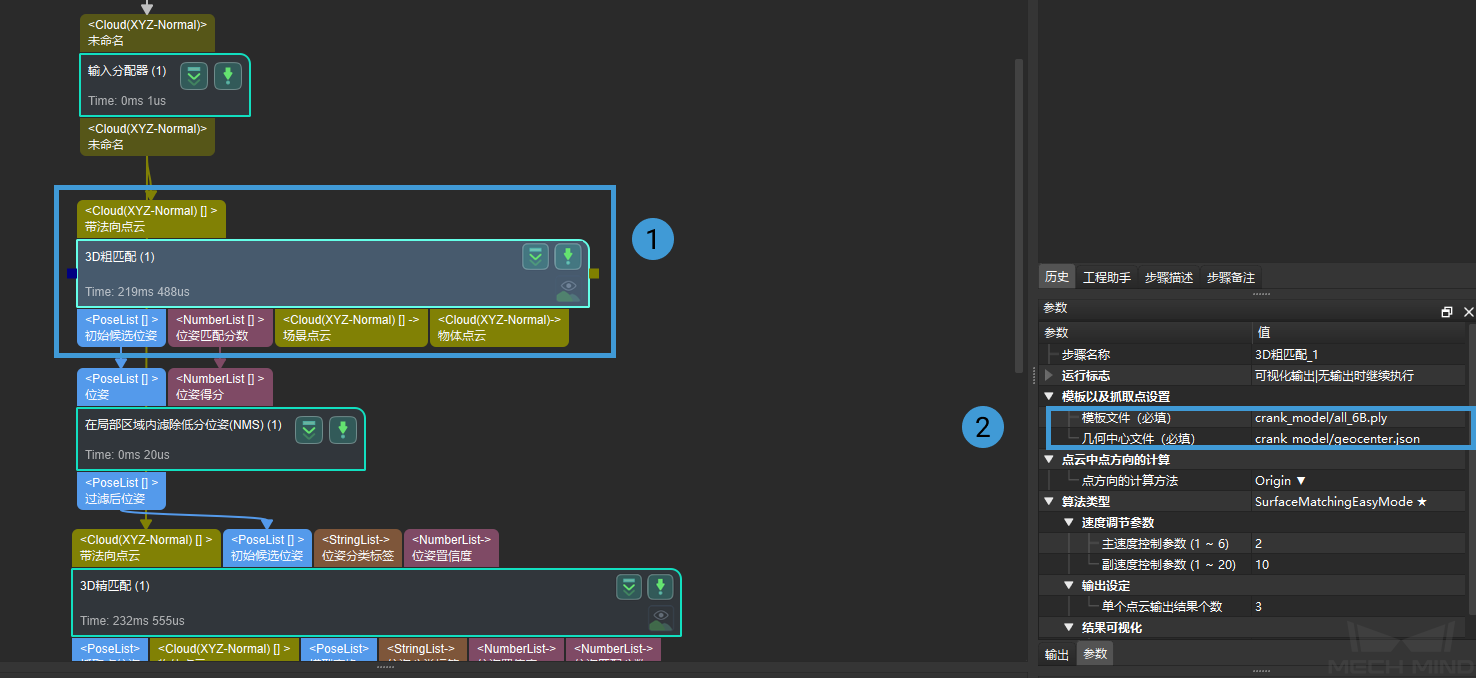
3D精匹配 中模板文件和几何中心文件路径的配置方法同 3D粗匹配。
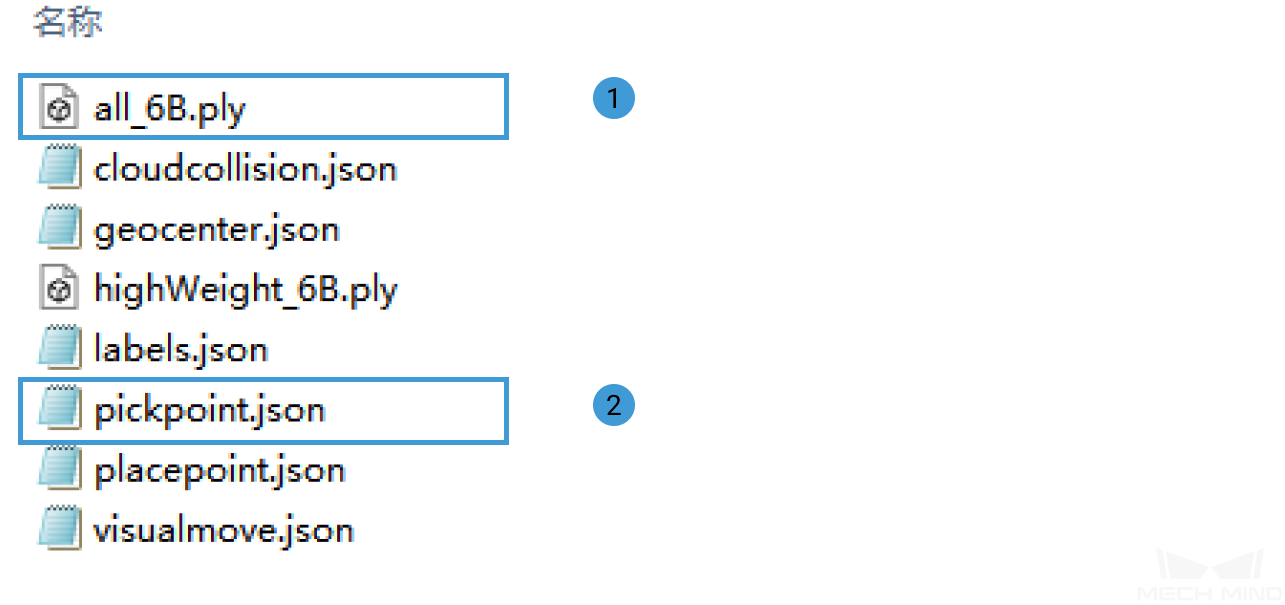
注解
各文件说明如下图所示,其中①为点云模板文件,②为几何中心文件。
2. 配置多抓取点位姿文件路径¶
点击 映射到多抓取点 步骤,点击界面右下角属性列表中出现的选择按钮 ![]() 添加位姿文件和位姿标签文件,如下图所示:
添加位姿文件和位姿标签文件,如下图所示:
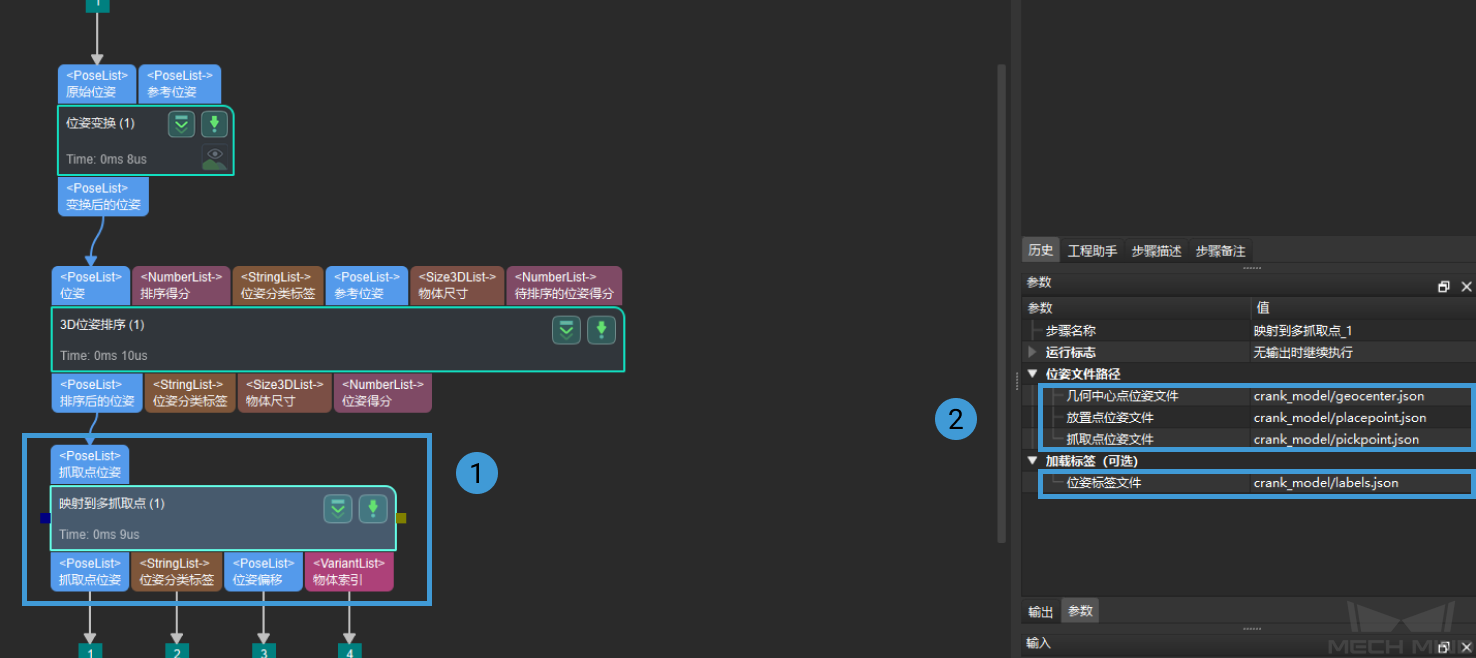
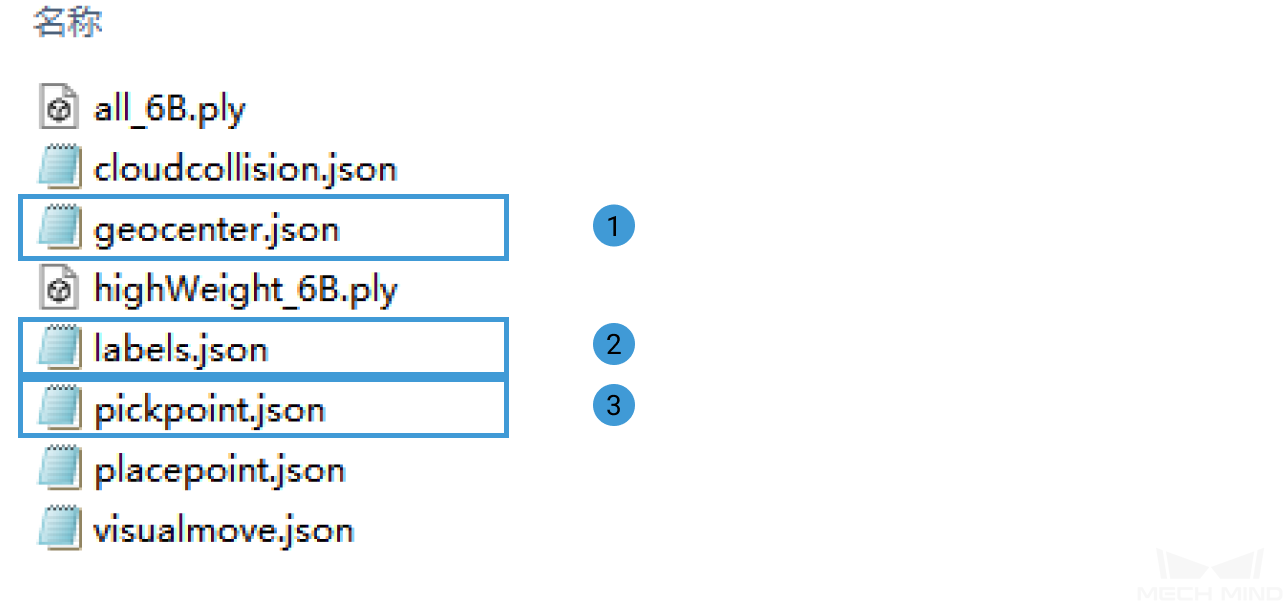
注解
各文件说明如下图所示,其中①为几何中心点位姿文件,②为位姿标签文件,③为抓取点位姿文件和放置点位姿文件。