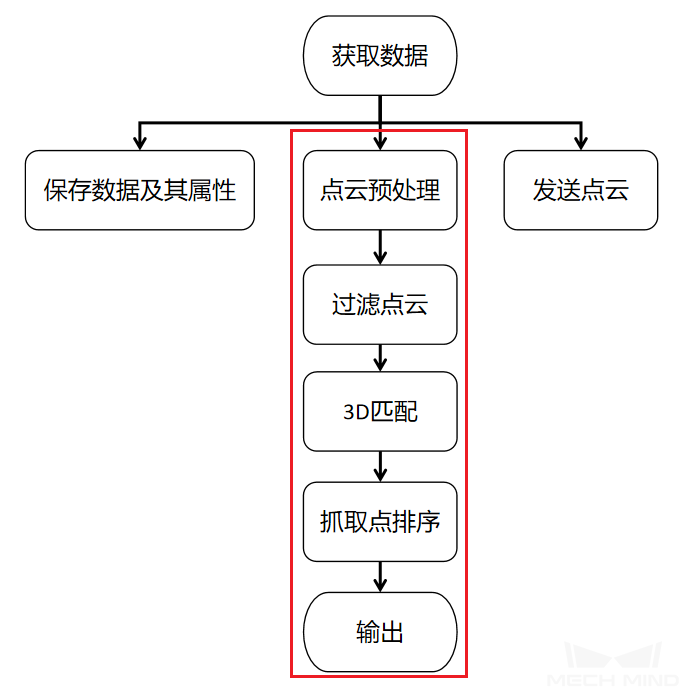
相关步骤详解
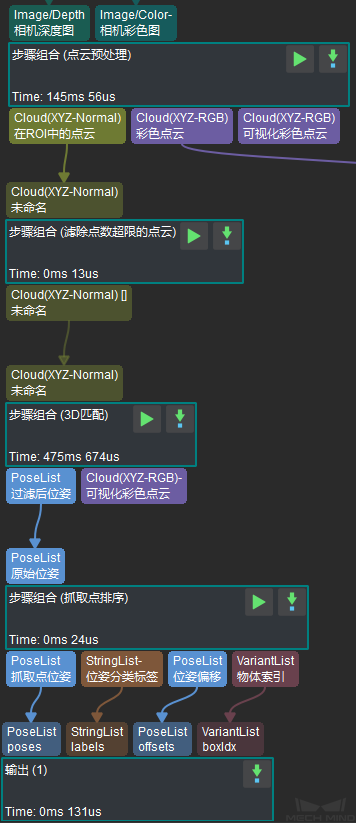
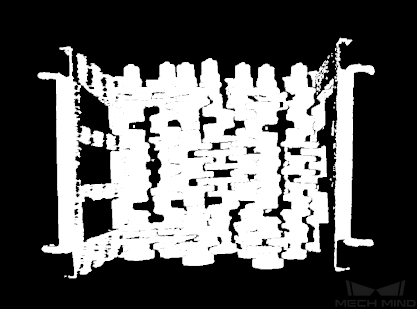
点云预处理
在大型曲面工件工程中,首先通过深度图和彩色图生成点云图,对点云进行法向量计算、滤波以及设置感兴趣区域,为后续运用点云进行工件匹配做准备。其结果如图3所示,具体详解见步骤组合 点云预处理。
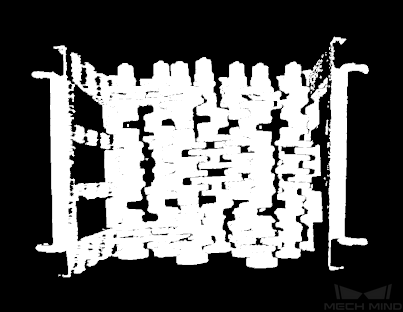
滤除点数超限的点云
在生成点云后,对点云进行滤波。滤除对3D匹配有影响的点云,提高匹配精度。其结果如图4所示,具体详解见步骤组合 滤除点数超限的点云。
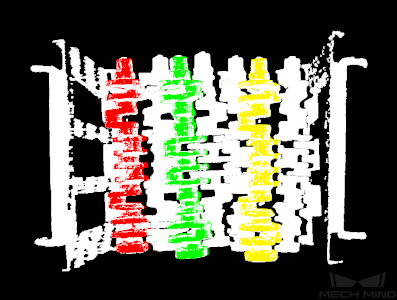
3D匹配
在对点云进行滤波之后,对工件进行3D匹配,并且得到抓取点。其3D匹配结果如图5所示,具体详解见步骤组合 3D匹配。
抓取点排序
在找到抓取点后,对抓取点进行转换坐标系、排序、映射到多抓取点一系列操作。具体详解见步骤组合 抓取点排序。