高精度定位工程详解¶
样例场景背景描述¶
汽车装配中存在轮毂定位、轮胎拧紧和齿轮箱装配等多个对位置精度要求较高的过程。传统的自动化生产流程无法为机器人提供物体的准确的位置信息,需要人为干预,因此效率较低。 为解决这一问题,提出了视觉识别结果和模板文件多次匹配的3D视觉定位技术,精准获取物体的三维姿态和位置信息,提高了高精度装配过程的效率。
视觉流程¶
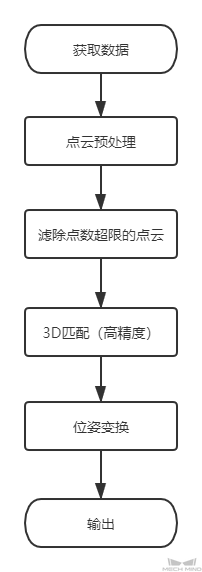
根据上述思路,设计由从相机获取图像、点云预处理、滤除点数超限的点云、3D匹配(高精度)、位姿变换和输出六个主要部分组成的视觉工程。 如下图2所示。各部分组成和作用将在下文进行讲解。
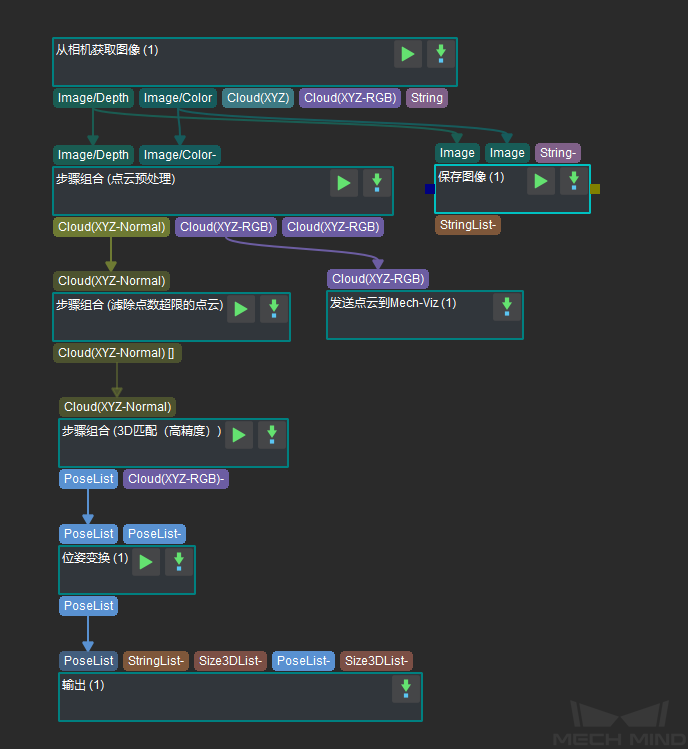
图2 高精度定位视觉工程¶
相关步骤详解¶
点云预处理¶
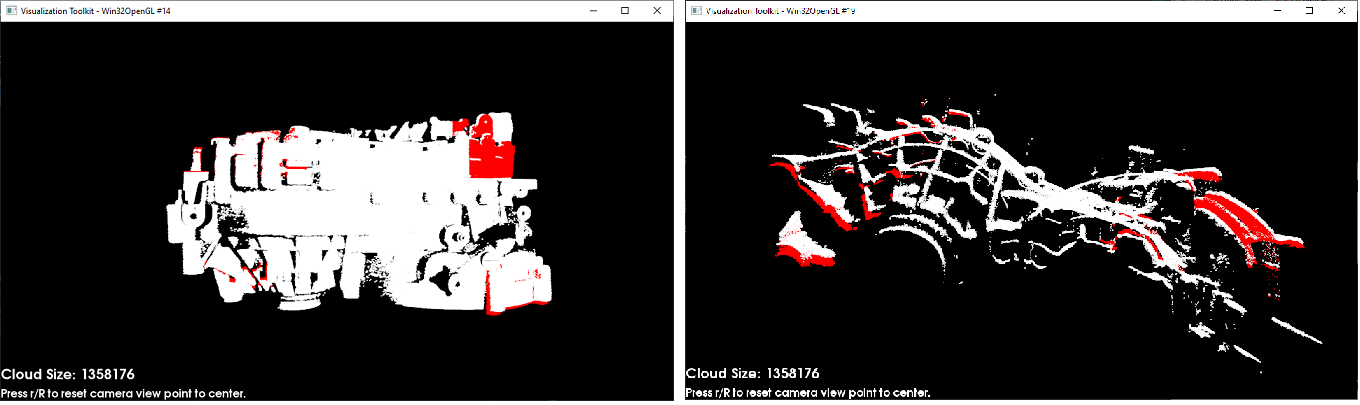
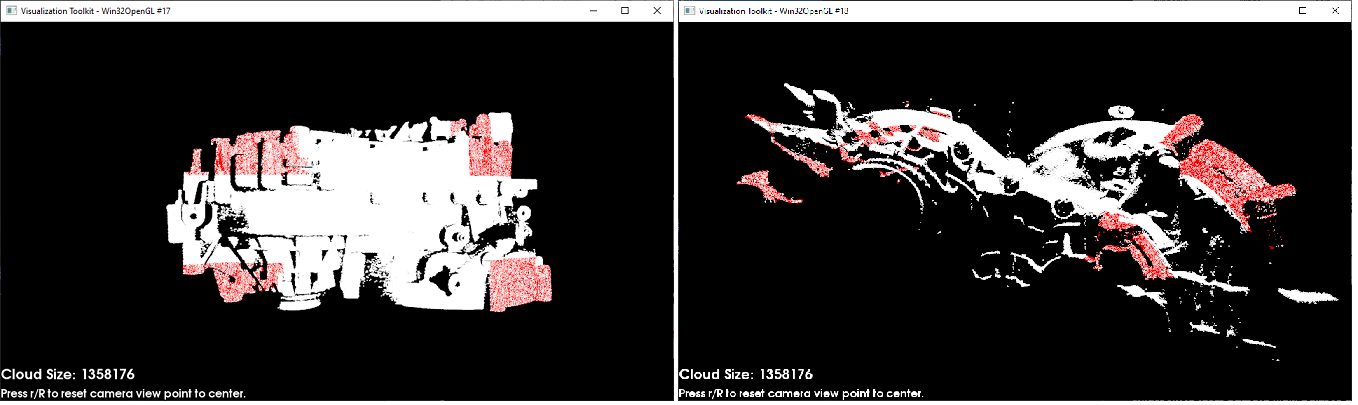
使用场景的彩色图像及其深度图生成点云,去除干扰,得到在感兴趣区域内的点云,加快后续计算速度。详细解释请参考 点云预处理, 结果如下图3所示(左图为原始点云,右图为预处理后点云)。
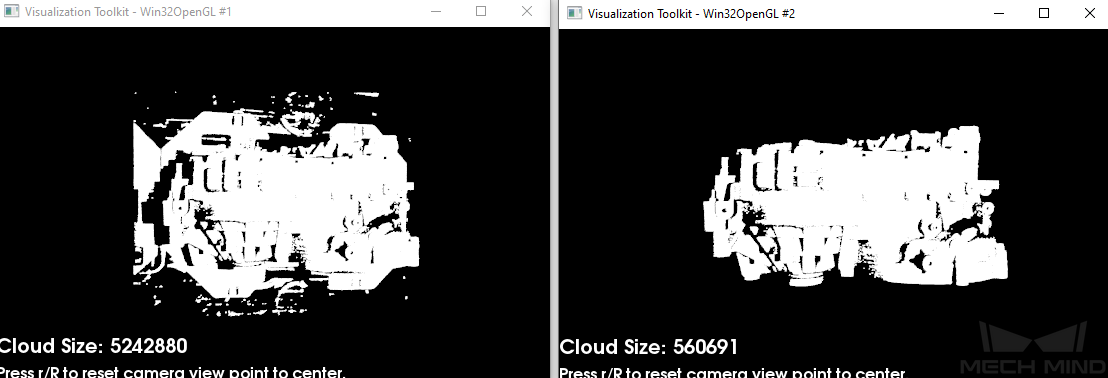
图3 点云预处理结果¶