 relative_move¶
relative_move¶
Parameters¶
- Basic & Basic Move
- Basic Move
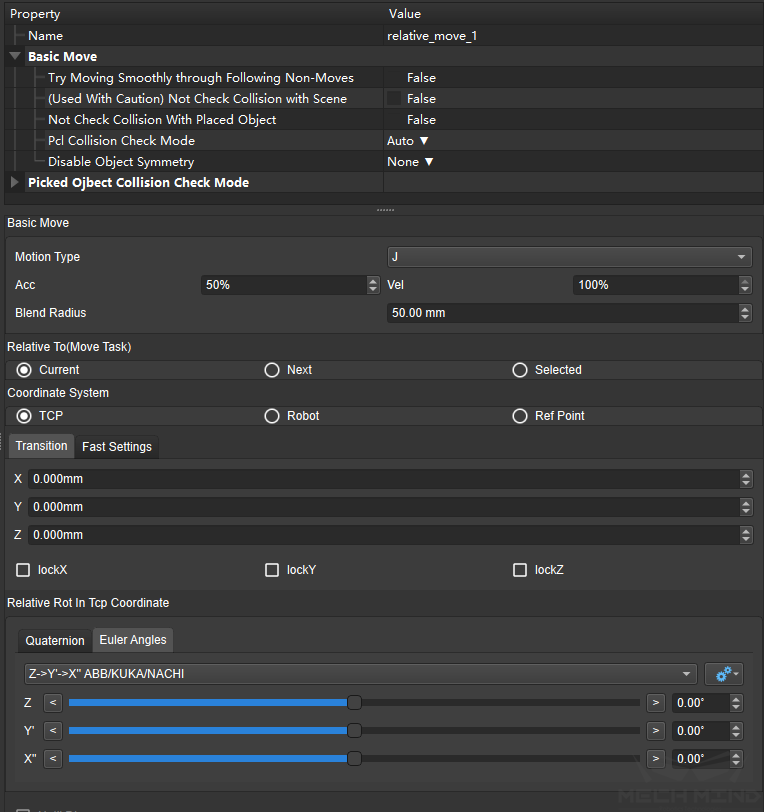
- Relative to (movement tasks)
The relative position setting includes the setting of the reference point, the relative coordinate system, and the offset vector. Wherein the reference point can be Current , or you can choose the Next point in the track. The coordinate system where the offset vector is located can be TCP , or Robot , and Ref Point . The offset vector is expressed by x, y, and z.
If you choose TCP , robot will relative move based on the TCP coordinate system; and if you choose Robot , robot will relative move based on the Base coordinate system. The comparison between moving based on two coordinate systems shown in the figure below:
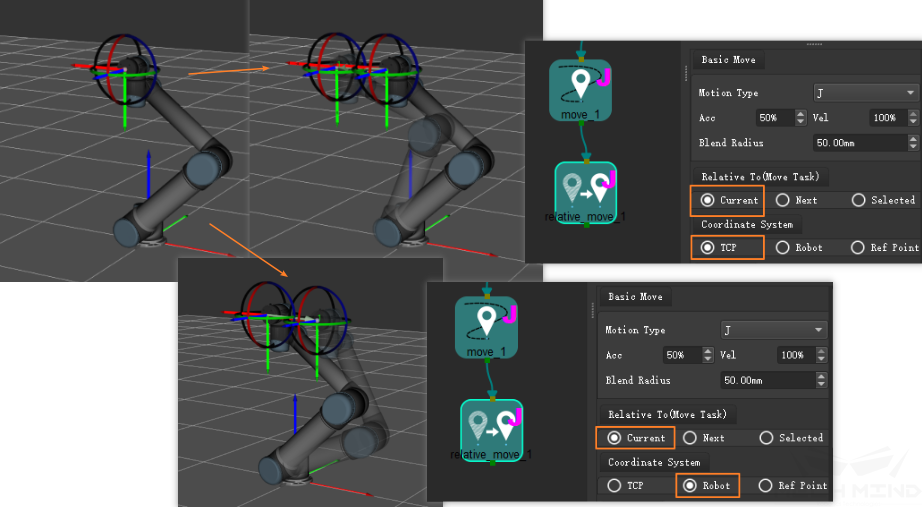
relative to current¶
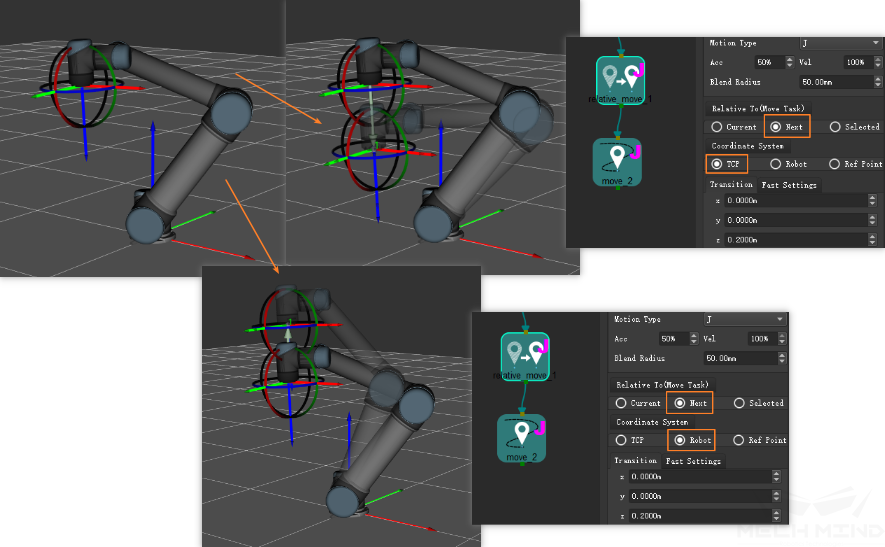
relative to next (point)¶
- Reference point description
When the detected objects are in deep box, you can choose Ref Point to avoid collision of end effector and box during vertical picking(default Z direction of relative_move), relative_move will use the Ref Point as the target direction, and the movement distance will be the preset value.

relative_move when Coordinate System is Ref Point¶