 move¶
move¶
Description¶
Parameters of Move¶
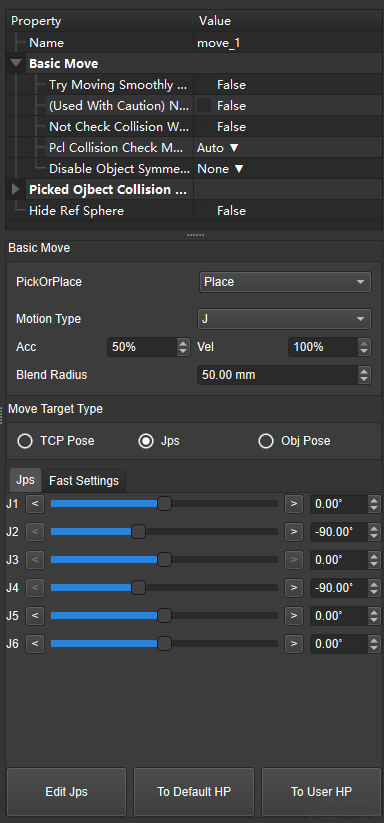
Set a target pose in the robot’s motion path and the way to move to that pose
Parameters¶
- BasicMove
- hideRefSphere
Hide reference ball model.
- Offset
X/Y/Z offset: if the movement type is TCP Pose or Obj Pose, it is the X/Y/Z offset relative to the specified point in the corresponding reference system.
Example: if the Z-direction offset is 0.2 m, when it is TCP Pose, the actual position of the robot’s movement is the position where the specified point extends 0.2 m in the positive direction along the z-axis of the TCP coordinate system.
- Basic Move