 outer_move¶
outer_move¶
Description¶
Perform target pose to be moved obtained from external services
This module is used by Mech-Viz to obtain the target pose moved from an external service and run the robot to that pose. It must be used in conjunction with the adapter
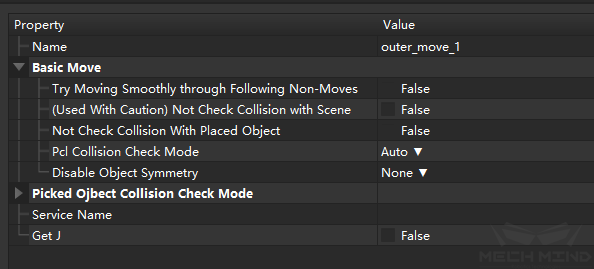
Parameters¶
- Basic parameters of movement tasks
- serviceName
The external server name registered by the adapter on the Mech-Center. This parameter must be unified with the adapter to obtain the module interface via the server name and send to the destination.
- getJ
By default it is False, the position where the last planning ended will be used for the initial position of the software planning trajectory; if it is checked as True, the initial position of the software planning trajectory will be updated to the robot joint position obtained from the external. It is usually used when Mech-Viz does not fully control the robot motion