레이저 프로파일러의 작동 원리
레이저 프로파일러는 내부에 있는 레이저 이미터와 감광체를 사용하여 대상 물체를 스캔합니다. 이 부분에서는 일반적인 스캔 과정 및 관련 개념을 소개합니다.
스캔 과정
-
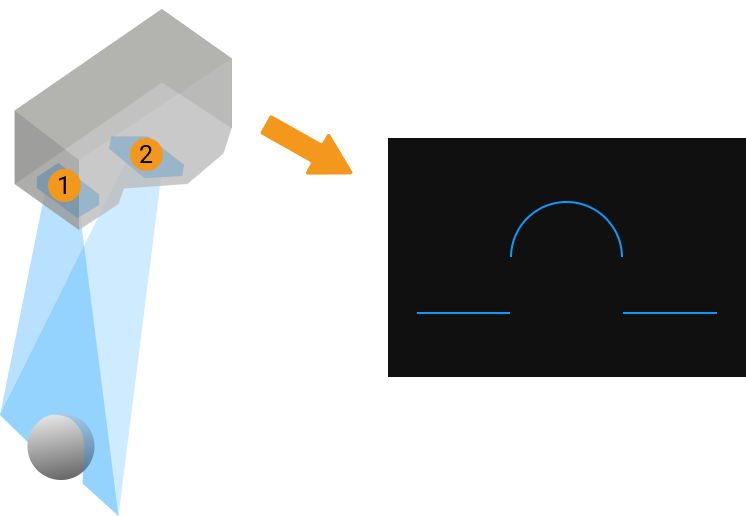
레이저 이미터(위 그림의 1)는 레이저 프로파일러의 FOV 내의 대상 물체에 레이저 빔을 방출합니다.
-
레이저 빔은 대상 물체에 의해 반사되어 감광체(위 그림의 2)에서 수신됩니다. 감광체와 레이저 이미터 사이에 존재한 협각으로 인해 대상 물체의 표면에서 서로 다른 높이의 레이저 빔은 감광체의 서로 다른 위치에 반사됩니다. 이때 감광체에 생성된 이미지는 Mech-Eye Viewer 중의 원시 이미지입니다.
-
레이저 이미터, 감광체 및 대상 물체가 하나의 삼각형을 형성합니다. 레이저 프로파일러는 삼각 측량법에 따라 알려진 각도와 거리를 사용하여 반사된 레이저 라인의 각 지점에서 센서까지의 거리를 계산할 수 있습니다.
-
레이저 프로파일러는 계산 결과와 다른 파라미터 설정 사항에 따라 원시 이미지에서 하나의 프로파일을 추출합니다. 프로파일은 대상 물체의 단면와 센서 사이의 거리 변화, 즉 높이 변화를 반영합니다.
-
대상 물체는 레이저 프로파일러를 기준으로 움직입니다. 위 단계를 반복하여 레이저 프로파일러를 통해 여러 번 스캔을 수행하면 대상 물체에 대한 일련의 프로파일을 획득할 수 있습니다. 이런한 프로파일을 사용하여 광도 이미지, 뎁스 맵과 포인트 클라우드를 생성할 수 있습니다.
관련 개념
-
라인 스캔: 레이저 프로파일러가 레이저 빔을 한 번 방출하여 하나의 프로파일을 생성하는 과정입니다.
-
데이터 획득 라운드: 레이저 프로파일러가 여러 번 라인 스캔을 완료하고, 여러 프로파일을 생성하고, 프로파일을 연결하여 광도 이미지, 뎁스 맵 및 포인트 클라우드를 생성하는 과정입니다.
-
트리거: 레이저 프로파일러가 일련의 데이터 획득 또는 라인 스캔을 시작하게 만드는 동작입니다.
하나의 데이터 획득 라운드 및 한 번의 라인 스캔 과정은 각각 두 가지 트리거 방식이 있으며 각각 다른 시나리오에 적용됩니다. 이와 관련된 상세한 소개는 데이터 획득을 트리거하는 방식 내용을 참조하십시오.