ロボットハンドのオフセットについて
以下では、ロボットハンドのオフセットの概念、その役割および注意点について説明します。
オフセットの概念
ロボットハンドのオフセットとは、ハンドの構造における一形式を指します。以下の2つの状況に分けて説明します。
-
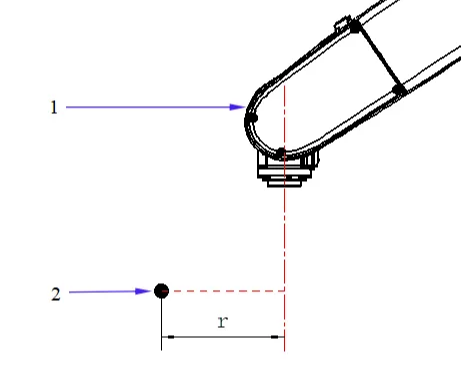
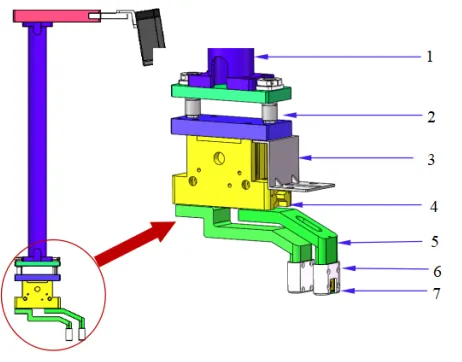
水平方向の座標オフセット
ロボットがワークを把持する際、ロボットのフランジ位置姿勢と把持点は鉛直方向に対して一定の水平距離(オフセット半径)があります。下図では、1がロボット、2把持点、rがオフセット半径です。
-
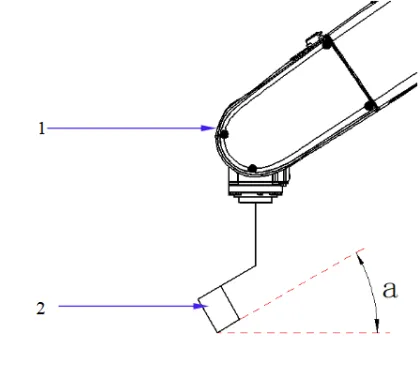
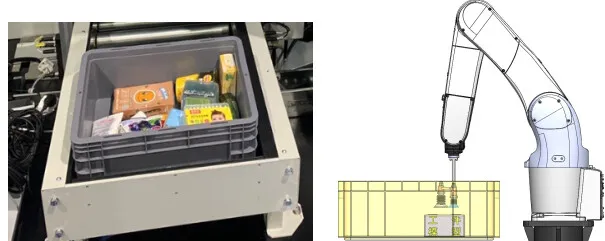
TCPの向き(角度)のオフセット
特定のシーンでは、ハンド先端の把持面をロボットフランジの取付面に対して一定角度で設置することで、オフセット量を増やすことが可能です。下図では、1がロボット、2がロボットハンドです。
オフセットの役割
ロボットハンドのオフセットは、設計段階で位置や角度の差をあらかじめ設定することで、ロボットの把持姿勢を最適化し、干渉を回避するとともに、複雑な作業環境での把持の柔軟性と効率を向上させます。
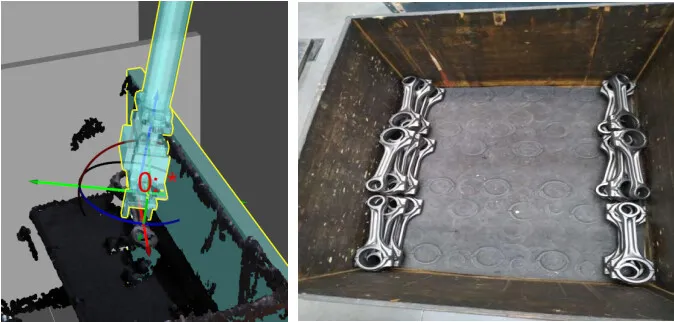
手首の特異点回避
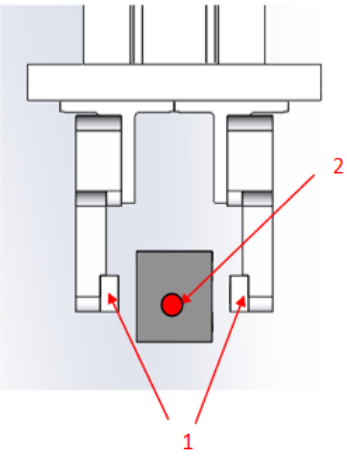
実際のプロジェクトでは、ワークの供給形態が多様で、供給時の姿勢が一定でない場合があります。下図に示すように、オフセットがないと、特異点が発生する可能性があります。
この場合、ロボットのフランジ位置姿勢と把持点を同一鉛直線上に置かないように調整する必要があります。
オフセットの注意点
ハンドにオフセットを設定する際は、以下の点に注意し、把持テストを行う必要があります。
ロボットの可搬重量の低下
ロボット本体の可搬重量曲線およびハンドのオフセット量に基づき、ロボットの実際の可搬重量を確認し、オフセット後でもプロジェクトの把持要求を満たすことを確認する必要があります。
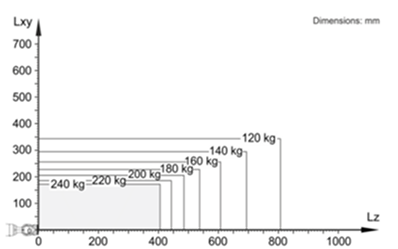
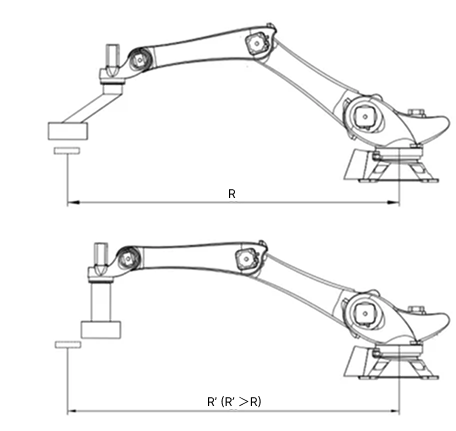
下図はあるロボット先端の可搬重量の変化例です。Lxy はフランジ座標系の X/Y 軸方向のオフセット、Lz は Z 軸方向のオフセットを示します。
オフセットが250 mmを超えると可搬重量が大幅に低下します。オフセットを170 mm以内に抑えると、Z軸方向に400 mmまでオフセットしても十分な可搬質量が確保できます。