深型コンテナからのピッキングに関するよくある問題
以下では、ロボットハンドを使用して深型コンテナ内のワークを把持する際によく発生する問題と、その解決策について説明します。
ハンドの構造設計が不適切
-
問題
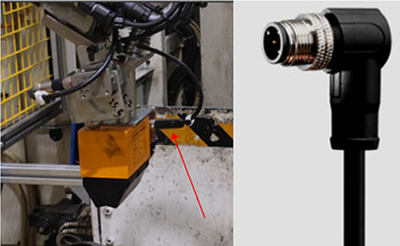
ハンドの外形寸法が大きすぎ、構造設計が不合理です。コンテナ内の底層ワークを把持する際、ハンドがコンテナやワークと衝突し、期待した切り取り率が達成できないことがあります。

-
解決策
ハンドを設計する際には、以下の点に注意してください。
-
コンテナの深さを十分に考慮し、極限条件下でもワークを正常に把持できるようにしてください。
-
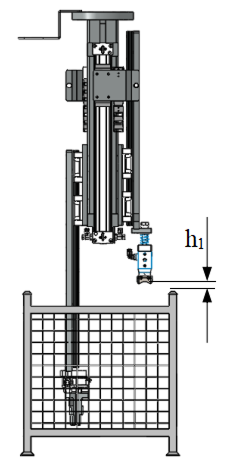
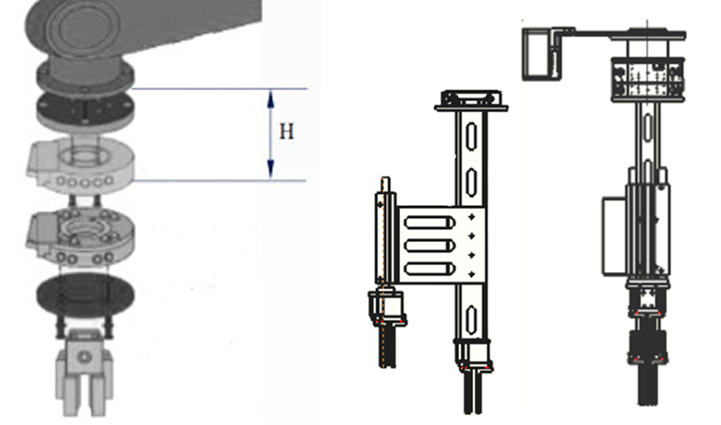
底層のワークを把持する際は、ロボットの第6軸先端、カメラ、ケーブル保護管およびハンドの他の付属品が、コンテナ上面から一定の安全距離を保つようにしてください(下図 h1 参照)。
-
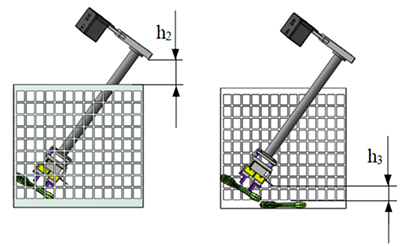
ハンドを傾斜させてワークを把持する場合も同様に、ロボット第6軸先端、カメラ、ケーブル保護管およびハンドの付属品が、コンテナのエッジや他のワークと衝突しないように、十分な安全距離を確保してください(下図 h2・h3 参照)。
-
一般的には、ロボットの第5軸や第6軸を深型コンテナに進入させて把持することは推奨されません。ただし、ワークが大きく、コンテナが特殊設計(長さ・幅が大きく高さが小さい)の場合は、この限りではありません。
-
同一作業セルで複数種類のワークを扱う場合は、上記要件を満たす複数のハンドを設計してください。一般的にはツールチェンジャーを用いて異なるハンドを切り替えることが可能です。ツールチェンジャーの精度が把持精度に影響を与えないように注意してください。また、カメラをハンド側に取り付けないでください。
ツールチェンジャーの取り付け位置は下図 H 領域のとおりです。
-
複数のハンドやカメラを設置する場合、同一方向に並べないようにしてください。
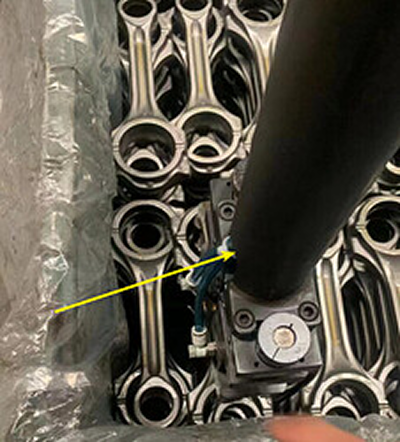
下図のように、ワークが傾いた場合、ある方向でハンドの長さが大きすぎると、把持時にコンテナと衝突しやすくなります。
実際の生産においては、下図を参考にハンド設計を行ってください。
-
ハンドの互換性が低い
-
問題
ハンドの互換性が低い場合、正確な把持にはワークの正確な位置姿勢に依存します。しかし、深型コンテナの供給ワークはランダム性が高く、さらにワーク特性(反射性など)や生産ライン全体の精度も影響するため、安定して正確な位置姿勢を取得することが難しくなります。その結果、ハンドによる把持が失敗したり、把持後にワークが落下したり、ワークの配置に悪影響を及ぼすことがあります。

-
解決策
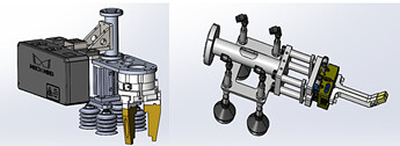
高い把持精度が求められるシーンでは、ハンドにフローティング機構を追加することを検討してください。これにより、ワーク位置姿勢の誤差に柔軟に対応でき、把持の信頼性が向上します。下図のように示します。
フローティング機構を設計する際には、以下の点に注意してください。
-
フローティング機構は「フロート状態」と「非フロート状態」を自由に切り替えられる必要があります。さらに、ワーク把持後、ハンドが直ちに把持前の状態に戻るように設計してください。
-
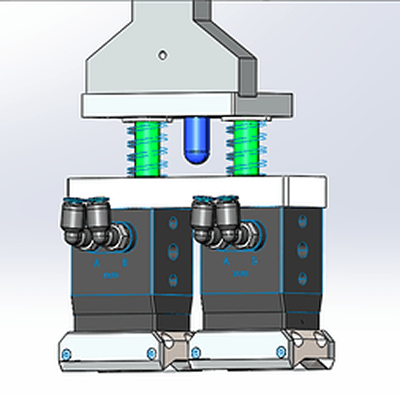
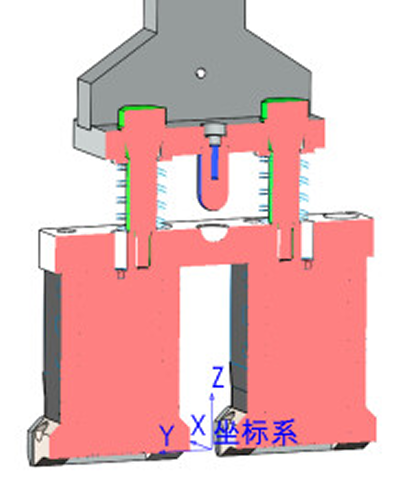
ハンドがフロート状態にある場合は、必要な方向のみにフローティングを設け、それ以外の方向は固定してください。例えば、ハンドをZ方向にフローティングさせる場合は、X・Y 方向を固定します。
典型的なフローティング機構の設計例を下図に示します。
-