3D ロボットビジョンソリューションの概要
3D ロボットビジョンソリューションについて
3D ロボットビジョンソリューションは、Mech-Mindのセンサー検知、ビジョン理解、経路計画などの技術を統合した包括的なソリューションであり、ロボットが複雑で未知または動的な環境で直面する課題に対処することを目的としています。
このソリューションは、部品供給、パレタイジング・デパレタイジング、位置決め・組立て、商品仕分けなど、様々な適用シーンを提供しており、自動車、物流、スーパーマーケット、重工業などの幅広い業界で広く採用されています。
このソリューションの導入は、Mech-Mindビジョンシステムをロボットシステムに統合することで、完全な3Dビジョンアプリケーションを構築し、3Dビジョンシステムを活用してロボットの自動化作業を実現することを目的としています。
このソリューションを導入するために必要なソフトウェアとそれに対応するバージョンについては、3D ロボットビジョンソリューションの組合せ可能なソフトウェアの推奨バージョン をご参照ください。
3Dロボットビジョンアプリケーションの構成
3Dロボットビジョンアプリケーションは通常、ロボット、カメラ、IPC、およびMech-Mindソフトウェアで構成されています。
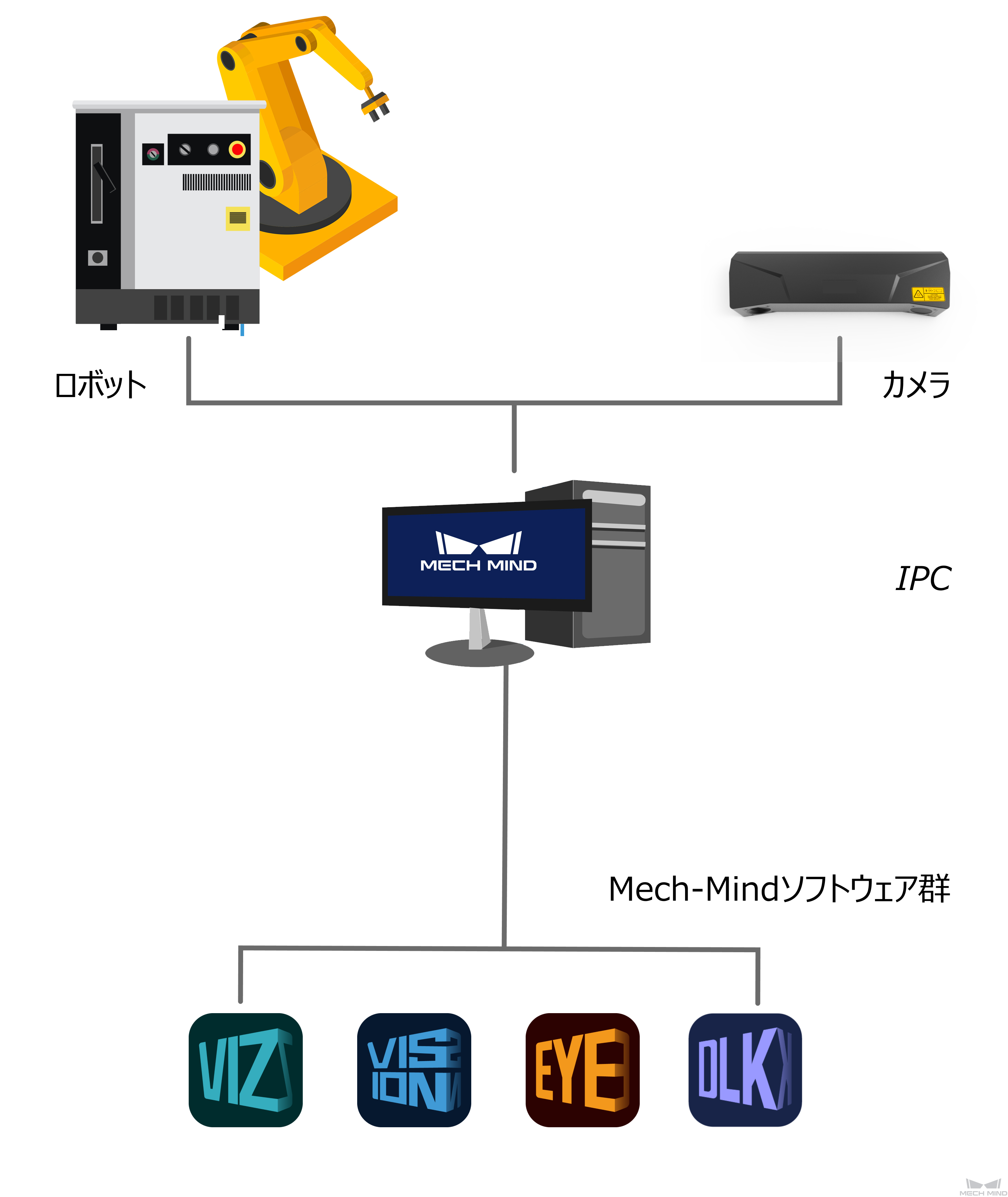
ロボット
ロボットは、移動、動作、位置決めなどのタスクを実行するために、ある程度の自律性を持ってプログラムされた機械装置です。Mech-Mindビジョンシステムにおいて、ロボットはビジョンシステムの出力結果に応じた自動化作業を実行します。
|
カメラ
Mech-Mindが独自に研究開発したMech-Eye産業用3Dカメラ(以下は「カメラ」)を指します。それを使用して対象物の画像や位置情報を取得できます。
IPC
Mech-Mindソフトウェアの動作環境を提供するコンピュータ機器を指します。
Mech-Mindが提供する標準的なIPC(推奨)を使用するか、独自のデバイスをIPCとして使用することができます。IPCの詳細については、IPC型番選択 をご参照ください。
Mech-Mindソフトウェア
Mech-Mindソフトウェアは、カメラで取得した画像と位置情報をもとにビジョン処理を行い、対象物の位置と姿勢、計画されたロボットの動作経路を出力し、把持、パレタイジング・デパレタイジング、接着、仕分けなどの自動化作業でロボットをガイドするために使用されます。Mech-Mindソフトウェアはそれぞれ役割を果たしています。詳細については、 Mech-Mindソフトウェアの概要 をご参照ください。
|
本文では、Mech-Mindが提供するカメラ、IPC、Mech-Mindソフトウェアは総称して「Mech-Mindビジョンシステム」と呼ばれます。 |
Mech-Mindソフトウェアの概要
Mech-Mindビジョンシステムには、以下のソフトウェアが含まれています。
-
Mech-Eye Viewer カメラ調整ソフトウェア
Mech-Eye Viewerは、カメラのパラメータを対象物の特徴に合わせて調整し、高品質な2D画像、深度画像および点群を簡単かつ迅速に取得することができます。

-
Mech-Vision 画像処理ソフトウェア
Mech-Visionは、グラフィカルなインターフェイスにより、プログラミング不要でバラ積みピッキング/パレタイジング・デパレタイジング/位置決め・組立/塗布・塗装/溶接/欠陥検査/寸法測定などの実装ができる高度な画像処理ソフトウェアです。3Dビジョン、ディープラーニングなどといった最先端のアルゴリズムを内蔵しており、複雑な多様なニーズに対応します。
このソフトウェアは、取得された画像データに基づいて一連のビジョン処理を行い、最終的にビジョン結果(対象物の位置や向きなど)を出力します。また、ビジョン結果に対して簡単な経路計画を行い、ロボットの把持経路を出力することも可能です。

-
Mech-Viz ロボット経路計画ソフトウェア
Mech-Vizは、Mech-Visionから得られた点群やワークの位置情報を使用して、把持、取り扱い、配置などのロボット経路を自動的に計画します。
グラフィカルなインターフェイスでプログラミング不要であることに加え、ワンクリックでシミュレーションが実行できる、高度なロボット経路計画ソフトウェアです。経路計画/衝突検出/把持計画などのアルゴリズムを内蔵しており、多くのロボットメーカーのロボットに対応します。

-
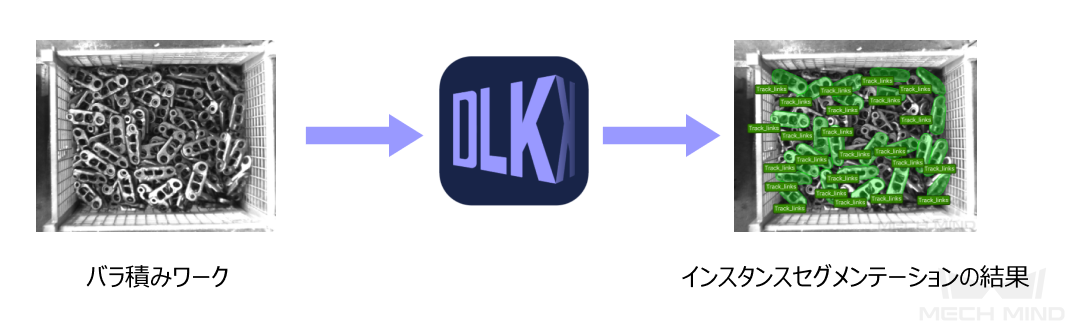
Mech-DLK ディープラーニング学習用ソフトウェア
グラフィカルなインターフェイスに加え、自社開発した強力なディープラーニングアルゴリズムを複数内蔵しています。
シンプルな操作方法でバラ積みされたワークの認識/高難度の欠陥検査/品質検査など、複雑な問題を迅速に解決し生産性を向上することで人件費の削減が可能です。
-
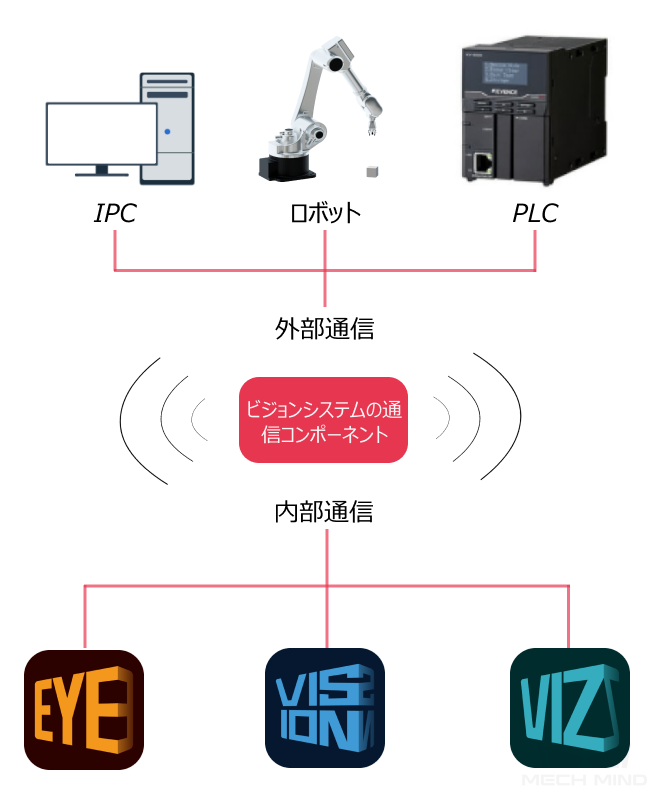
ビジョンシステムの通信コンポーネント
ビジョンシステムの通信コンポーネントは、ビジョンシステムのソフトウェア間のデータ交換を可能にし、ロボット、PLC、上位システムなどの外部機器との標準化およびカスタマイズされた通信をサポートしています。これにより、ビジョンシステムによるロボットの自動化作業を実現します。
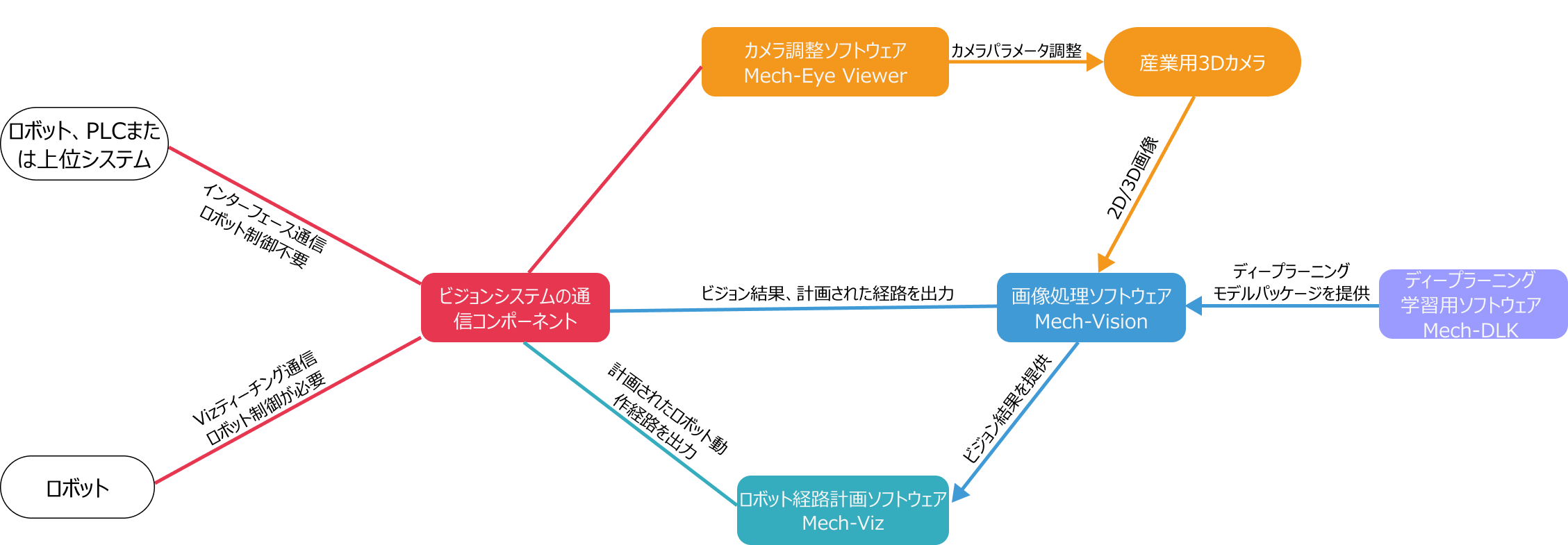
Mech-Mindソフトウェア間の関係を下図に示します。
ロボットシステムとの統合
Mech-Mindビジョンシステムは、外部通信インターフェースを提供し、ロボット、PLC、および上位システムなど、ロボットシステム内のデバイスとの通信統合をサポートしています。これにより、ビジョンシステムはロボット側にビジョン結果や計画されたロボットの把持経路(Mech-VisionまたはMech-Viz)を返すことができます。
Mech-Mindビジョンシステムは、以下の通信方式をサポートしています。
-
Vizティーチング通信
Vizティーチング通信では、ビジョンシステムがロボットを制御します。つまり、ビジョンシステムがマスター、ロボットがスレーブとして機能します。ビジョンシステムは、ロボットに対して動作やIOのコマンドを送信し、ロボットはこれらのコマンドを継続的に監視して実行します。ビジョンシステムは、ワークの供給やパレタイジング・デパレタイジングなど、計画されたロボットの動作経路に従って、対応するタスクを実行するようにロボットを制御することになります。
この通信方式を使用する場合、Vizとの通信プログラムをロボットに読み込むか、またはロボットのSDK(ソフトウェア開発キット)を介してロボットの制御を取得する必要があります。ビジョンシステムとロボット間の通信のみに対応しています。
-
インターフェース通信
インターフェース通信では、ロボット側がロボットを制御します。つまり、ロボット側がマスター、ビジョンシステムがスレーブとして機能します。ロボット側とシステムシステムは同じ標準通信プロトコルを使用して通信し、ロボット側がリクエストを送信し、ビジョンシステムは処理後に応答(対象物の位置姿勢とラベル情報)を返します。異なるリクエストに基づいて、ビジョンシステムはビジョン結果または計画された把持経路を返します。ロボットは、ビジョンシステムから返された結果に基づいてさらなる判断を行い、対応するタスクを実行します。
この方式を使用する場合、ロボットのインターフェースプログラム(ビジョンシステムと通信するためのプログラム)とロボットの把持プログラム(ビジョンシステムから返されたデータを受信し、ロボットを制御するためのプログラム)を作成してロボットに読み込む必要があります。ビジョンシステムがロボット、PLC、上位システムとの通信に対応しています。
通信方式の詳細については、通信方式の概要 をご参照ください。