实操指南
任意物体吸取(无料筐)工程中,主要包括以下操作流程。
新建典型应用工程
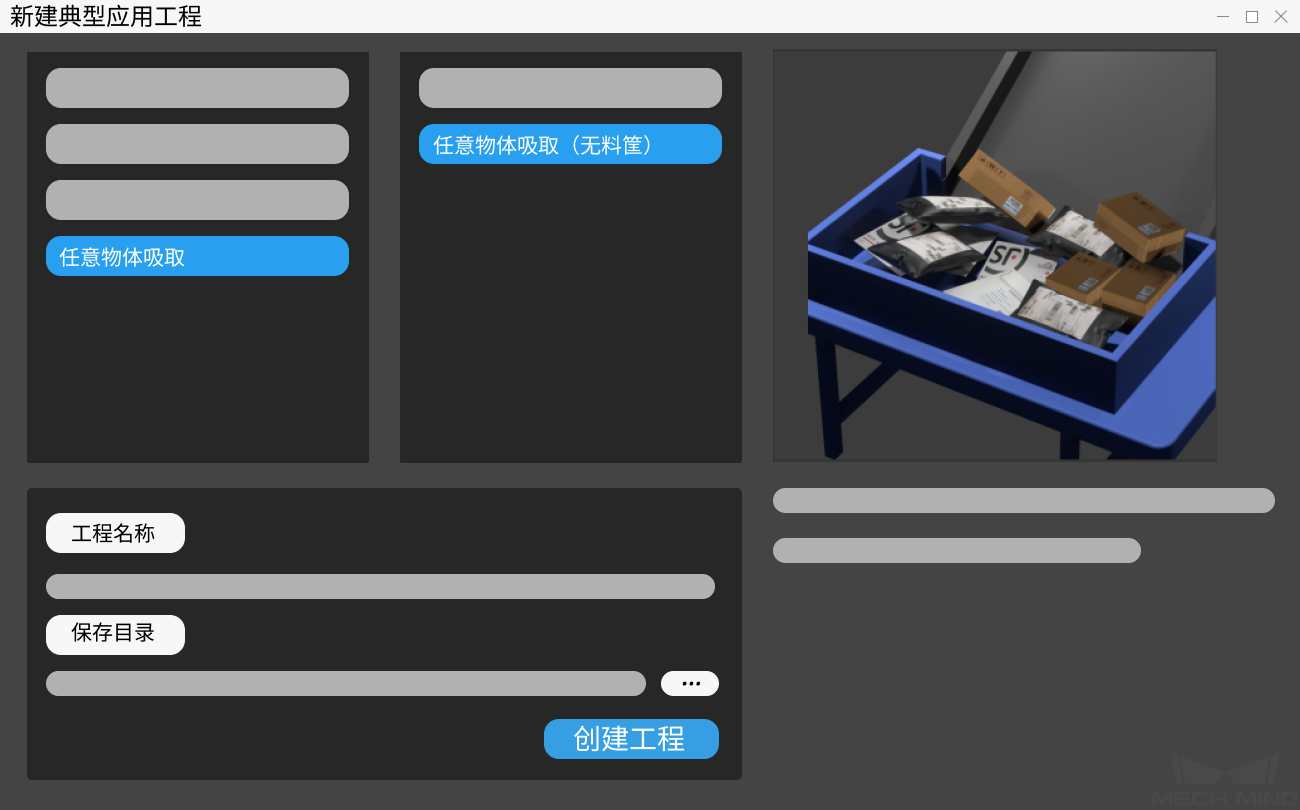
依次单击界面上方菜单栏中 ,或单击工具栏中的 新建典型应用工程 ,进入如下界面。
选择 任意物体吸取(无料筐) 。
输入自定义工程名称。
单击  选择工程文件夹的保存路径(建议用户创建空文件夹),然后单击 创建工程 。
选择工程文件夹的保存路径(建议用户创建空文件夹),然后单击 创建工程 。
准备工作
相机标定
相机标定的目的是生成相机的参数文件,用于确定机器人与相机的位置关系。
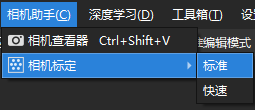
单击工具栏中的 相机标定(标准) 进行相机标定。
也可单击 进行相机标定。
如有疑问,请参考 相机标定标准模式 。
配置相机
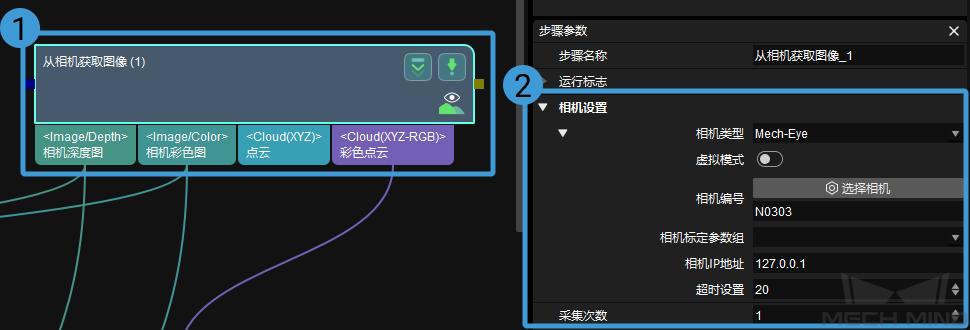
在使用相机采集图片前,用户需单击选中 从相机获取图像 步骤,然后根据实际情况正确配置编号、参数组、IP 地址等,请参考 从相机获取图像 完成相机配置。
运行和调试
提示
在运行工程时,应使用 60000~65535 的深度学习服务端端口号。
当工程调试完毕并成功运行后,若用户需采集现场数据,来方便后续反馈问题,
或者发现工程中的某个环节执行效果不理想,想在非现场环境对步骤或参数做进一步调优,
此时可以借助 数据保存 和 数据回放 工具,来实现上述目的。
使用 数据回放 工具的前提:
工程文件(工程可完整运行无报错);
运行工程中采集的全时序现场数据源,包括:2D 彩色图、深度图、相机参数文件,保存方法可参考 数据保存 。