从相机获取图像¶
功能描述¶
从真实相机或者虚拟相机获取彩色图、深度图和点云。
使用场景¶
一般作为视觉工程的起始输入,通过 Mech-Eye 工业级 3D 相机或第三方相机采集数据,或者在虚拟模式下使用本地的仿真数据。
输入与输出¶
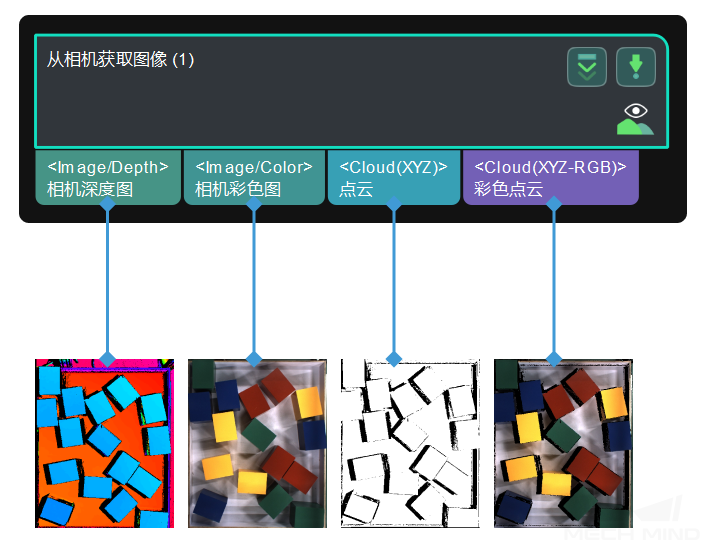
参数调节说明¶
使用真实相机¶
相机设置
- 相机类型
- 默认值:Mech-Eye值列表:External2D ,LMI ,Mech-EyeTOF ,Mech-Eye调节说明:连接真实相机时,需选择对应的相机类型。
注意
相机固件版本升至 2.0.0 后,推荐使用 Mech-Vision 1.6.2 及以后版本。如使用 Mech-Vision 1.6.1 及之前版本,连接 External2D EBUSCamera 中的相机时可能导致软件崩溃。
- 相机编号
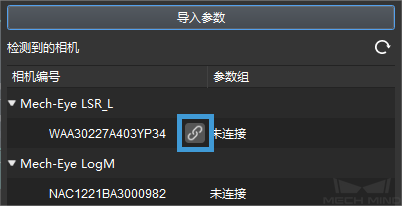
- 默认值:CAM00000调节说明:单击 选择相机 ,在弹出的窗口中选择需要连接的相机和对应的参数组,即可自动获取到该相机的相机编号。
首先在弹出的窗口中选择想要连接的相机,然后单击
 。
。
其次,相机连接成功后,
按钮变为  ,然后在 选择参数组 下拉列表中选择相机参数组。
,然后在 选择参数组 下拉列表中选择相机参数组。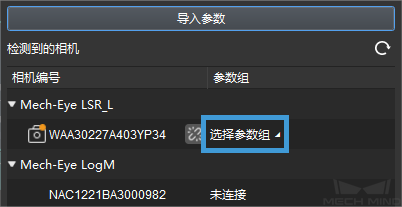
参数组选择完成后,如下图所示。
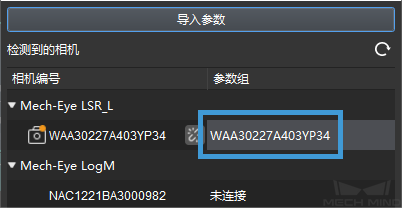
最后,相机连接成功且选择参数组后,相机编号和相机标定参数组将自动填充,如下图所示。
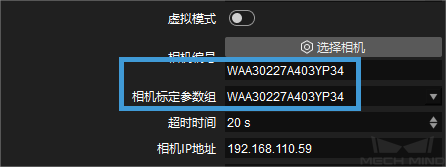
- 相机标定参数组
- 相机编号设置完成后自动填充,如上图所示。
- 超时时间
- 默认值:20s调节说明:响应超时时间。在此时间内相机采集不到图像,即为超时,此时相机会尝试再次采集图像。默认连续超时 3 次会报告异常。
- 相机 IP 地址
- 默认值:127.0.0.1调节说明:相机真实 IP 地址。相机连接成功且选择参数组后,IP 地址将自动填充。
- 相机型号
- 默认值:Unknown调节说明:本步骤会根据所连接相机自动获取对应的“相机型号”(本参数不可更改)。
- 相机 2D 图源类型
- 默认值:同源纹理图。值列表:同源纹理图,外置彩色图。调节说明:当用户使用 LSR 系列相机时(目前包括 LSR 和 DEEP),用户可根据需求选择“2D 图源类型”。同源纹理图与旧版本 Laser 相机一致,为黑白 2D 图像,无需矫正,与深度图在相同坐标系。外置彩色图为 2D 彩色相机所采集的图像,需要对图像进行矫正后才可以使用。
- 矫正至深度图坐标系
- 默认值:不勾选。调节说明:当 相机 2D 图源类型 为 外置彩色图 时显示此项。用于将外置彩色图坐标系矫正至深度图坐标系。
采集次数
默认值:3建议值:3调节说明:步骤运行过程中的拍照次数上限。若拍照失败,该次尝试也将被视为一次采集。
Mech-Center 中的机器人服务名
默认值:空。调节说明:填写机器人服务名,需要和 Mech-Center 中连接的机器人名称型号一致。
使用虚拟相机¶
相机设置
- 虚拟模式
- 默认值:不勾选。调节说明:当需要使用本地仿真数据时,勾选此项。
- 相机标定参数组
- 调节说明:当 图像数据路径 选择完成后, 相机标定参数组 将自动填充。若 图像数据路径 下存在多个相机标定参数组,可在此项的下拉栏中选择想要使用的相机标定参数组。
- 数据路径
- 调节说明:单击右侧
 按钮,选择数据文件夹。
按钮,选择数据文件夹。提示
当选择数据文件夹的过程中,存在以下几种情况时,会触发 虚拟相机助手 ,辅助用户选取图像数据。
数据文件夹路径为空;
选中的数据文件夹中存在多组数据;
选中的数据文件夹中缺少彩色图数据、深度图数据或内外参数据。
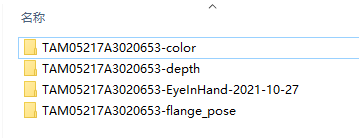
当相机标定方式为 Eye in Hand 时,数据文件夹中标准的图像数据格式如下图所示。
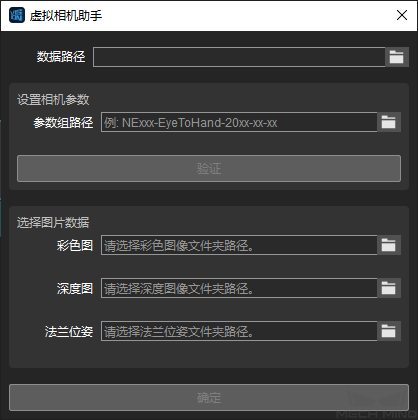
若选择的数据文件夹路径为空,运行此步骤后,在弹出的 虚拟相机助手 窗口中,首先需要单击
 选择数据路径,随后在此窗口中,相机编号、参数组内容将自动填充。然后单击 验证 ,出现 相机参数组已更新 字样。
选择数据路径,随后在此窗口中,相机编号、参数组内容将自动填充。然后单击 验证 ,出现 相机参数组已更新 字样。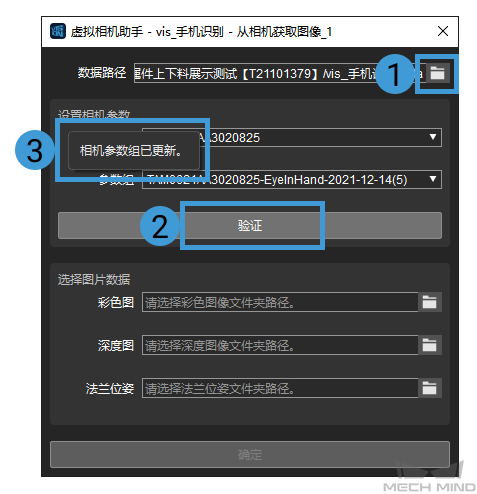
其次,需要通过单击
选择图像数据所在文件夹,即彩色图、深度图和法兰位姿,选择完成后,单击 确定 。
最后,在弹出的 设置完成 窗口中单击 确定 。
当相机标定方式为 Eye to Hand 时,数据文件夹中标准的图像数据格式如下图所示。
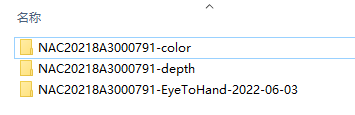
虚拟相机助手界面如下图所示, Eye to Hand 类工程的数据路径选择方法可参考上述 Eye in Hand 类工程的数据路径选择方法。
- 播放模式
- 默认值:顺序读取。值列表:顺序读取,重复单张,重复所有,随机读取。调节说明:根据实际需求选择图像数据的读取模式。
- 当前播放帧
- 调节说明:用于显示当前读取的图像的编号和时间戳。
注意
若虚拟模式下,数据路径下的图像数据有变动时,请重新选择数据路径,以重新读取完整的图像数据。出现数据显示缺失的原因为此步骤无法动态读取图像数据。