工程详解¶
相关步骤详解¶
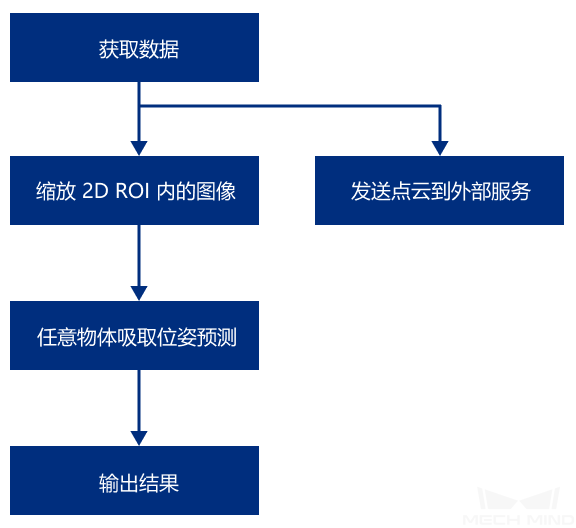
缩放 2D ROI 内的图像¶
该步骤用于将图片感兴趣区域缩放至指定尺寸。预测物体位姿的结果很大程度上受感兴趣区域及缩放比例的影响,若想获得较理想的位姿结果,必须调整好感兴趣区域及缩放比例。
关于 ROI 的设置方法可参考 设置 ROI 。
任意物体吸取位姿预测¶
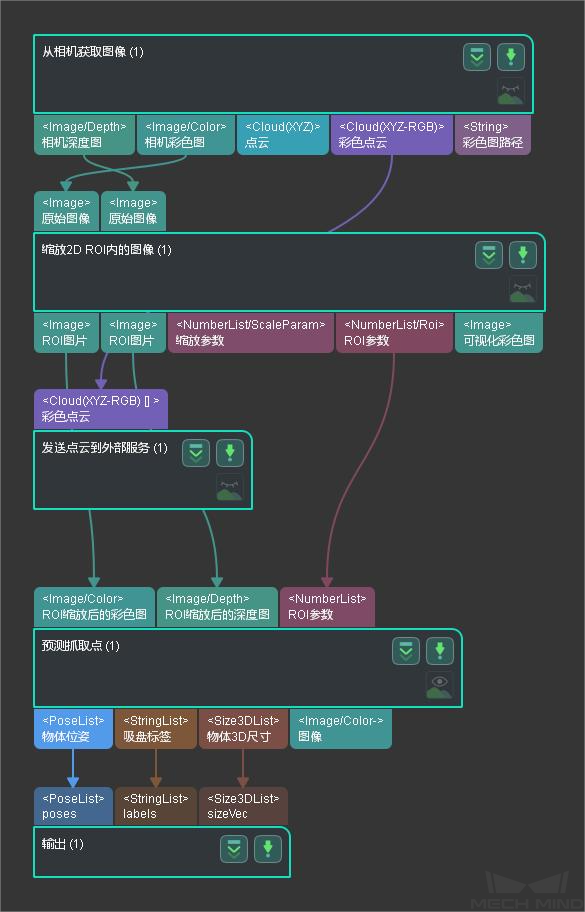
由于物体种类不定、形状各异,所以使用深度学习方法来预测抓取点,使用的步骤是 预测抓取点(任意物体) 。
输入彩色图、深度图、ROI 参数后,利用深度学习算法可得到:相机坐标系下的物体可吸取表面位姿(如下图所示)、可吸物体 3D 空间尺寸、可吸物体表面对应的吸盘标签。
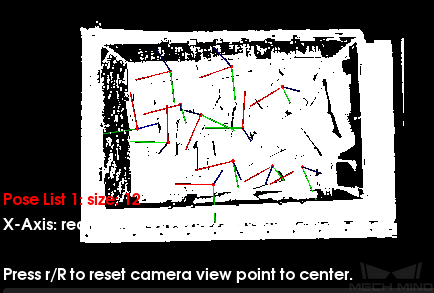
该步骤还可以实时显示标记了区域标签的图片,用户在可视化参数中可更改显示类型,方便用户观察所识别的物体。如按吸盘大小显示检测区域,效果如下图所示。

注解
开启可视化会降低工程整体运行速度。
可参考 预测抓取点(任意物体) 详细了解此步骤。