预测抓取点(任意物体)¶
使用场景¶
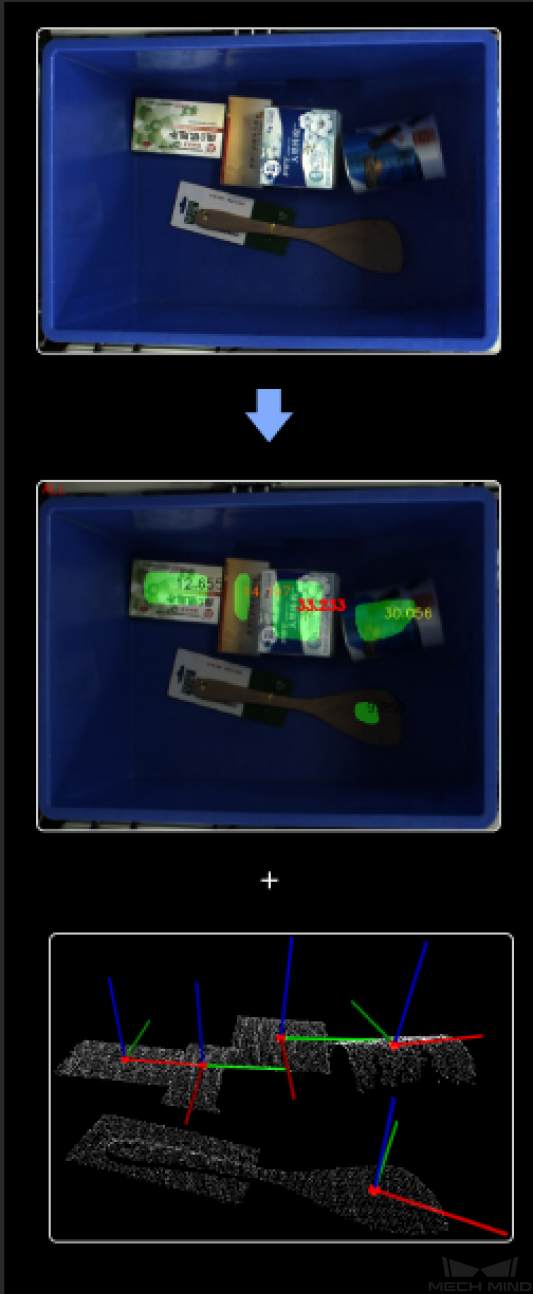
此步骤通常用于散乱堆叠的不同物品的分拣。
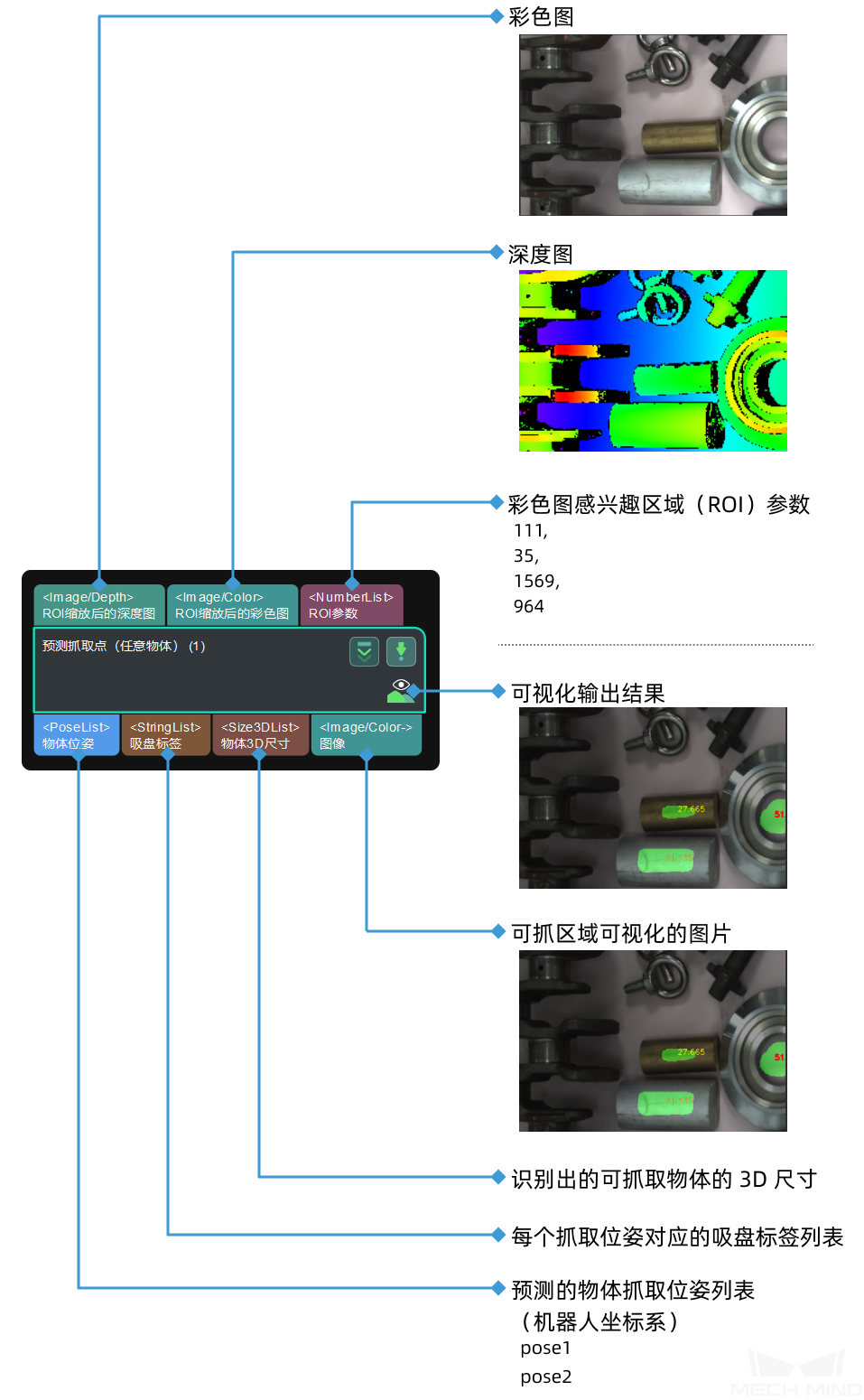
输入与输出¶
参数调节说明¶
服务端
- 服务端 IP
- 默认值:127.0.0.1调节说明:根据实际情况设置深度学习服务端 IP 地址。
- 服务端 Port(1 ~ 65535)
- 默认值:60052调节说明:在任意物体吸取、任意物体吸取(无料筐)工程中,应使用 60000~65535 的端口号。
工作距离
- 最小工作距离
- 默认值:0调节说明:相机至场景中物体的最短距离(单位:mm)。若使用料筐,请将此参数设为相机底部至料筐顶部边沿的距离。需根据实际情况设定此值。
- 最大工作距离
- 默认值:3000调节说明:相机至场景中物体的最长距离(单位:mm)。若使用料筐,请将此参数设为相机底部至料筐底部边沿的距离。需根据实际情况设定此值。
料筐设置
- 使用料筐
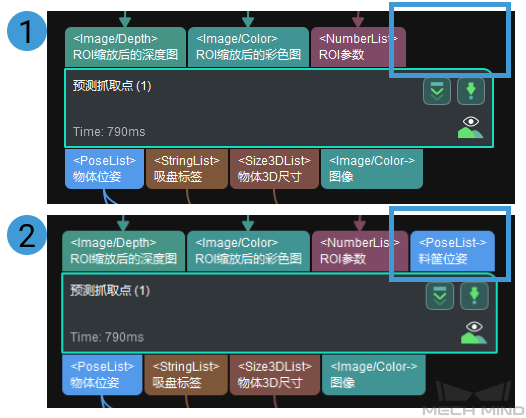
- 默认值:不勾选。调节说明:当需要料筐时,勾选此项,勾选后,此步骤将增加料筐位姿输入端口。如下图所示,图 1 为勾选前,图 2 为勾选后。
- 长
- 默认值:100mm调节说明:当勾选 使用料筐 后,需根据料筐尺寸设定此值。
- 宽
- 默认值:100mm调节说明:当勾选 使用料筐 后,需根据料筐尺寸设定此值。
轮廓检测(智能码放,异形件)
- 轮廓检测
- 默认值:不勾选。调节说明:用于检测物体的外轮廓。勾选后,将在下方出现 异形件过滤 参数。
异形件过滤 (常用于吸取快递的场景)
- 滤除过窄物体
- 默认值:不勾选。调节说明:勾选后,最小外接长方体最短边小于短边长度下限的物体将被当做过窄物体,并被忽略。
- 短边长度下限
- 默认值:0调节说明:勾选 滤除过窄物体 后显示此项,最小外接长方体最短边长度小于此值的物体将被忽略。需根据现场实际情况设定此值。调节示例:当此值设为 30 时,实际长度小于 30mm 的物体将被滤除。如下图所示,上图为滤除前,下图为滤除后。

- 滤除过长物体
- 默认值:不勾选。调节说明:勾选后,最小外接长方体最长边大于长边长度上限的物体将被当做过长物体,并被忽略。
- 长边长度上限
- 默认值:0调节说明:勾选 滤除过长物体 后显示此项,最小外接长方体最长边长度大于此值的物体将被忽略。需根据现场实际情况设定此值。调节示例:当此值设为 180 时,实际长度大于 180mm 的物体将被滤除。如下图所示,上图为滤除前,下图为滤除后。

压叠检测
- 压叠检测
- 默认值:不勾选。调节说明:当物体存在压叠情况时,勾选此项。勾选后,将对物体进行压叠检测,并降低识别出被压叠物体的抓取优先级。
- 最多检测压叠个数
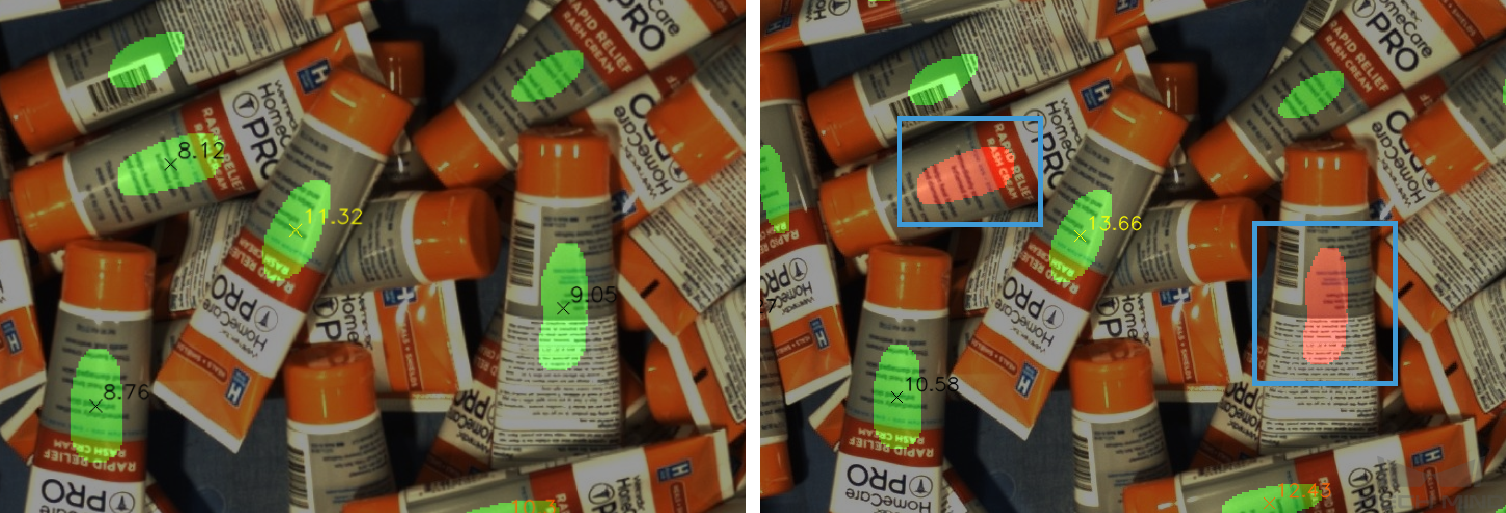
- 默认值:6调节说明:勾选 压叠检测 后显示此项,视为被压叠的最大物体数量。需根据现场实际情况设定此值。如果将此参数设置为较大的值,则更多物体将会视为被压叠,抓取任务更难完成,但更不容易破坏目标物体。调节示例:当此值设为 6 时,将最多检测到 6 个压叠的物体。如下图所示,左图为压叠检测前,右图为此值设为 6 后的检测结果,带有红色区域的物体为检测到的压叠物体。
吸盘设置
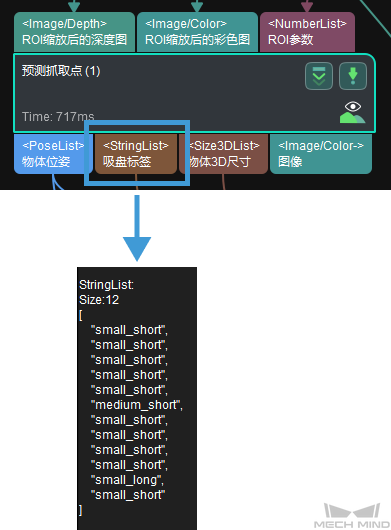
调节此参数将决定预测抓取点步骤的吸盘标签输出结果。
- 按掩膜体量分配
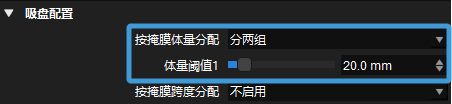
- 默认值:不启用。值列表:不启用、分两组、分三组。调节说明:根据掩膜最小内切圆半径的不同,物体将被分到不同组中,各组物体会有单独的吸盘配置。
- 体量阈值 1
- 默认值:0调节说明:掩膜最小内切圆半径的第一个阈值。半径小于此阈值的物体将被放入第 1 组,半径大于此阈值的物体将被放入第 2 组。调节示例:如下图所示,当检测到物体掩膜内接圆半径小于 20mm 时,判定吸盘标签为小。
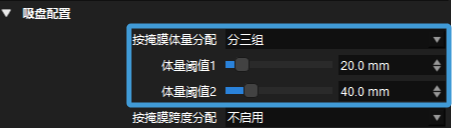
- 体量阈值 2
- 默认值:0调节说明:掩膜最小内切圆半径的第二个阈值。半径小于此阈值的物体将被放入第 2 组,半径大于此阈值的物体将被放入第 3 组。调节示例:如下图所示,当检测到物体掩膜内接圆半径大于 40mm 时,判定吸盘标签为大;当检测到物体掩膜内接圆半径位于 20mm 和 40mm 之间时,判定吸盘标签为中等。
- 按掩膜跨度分配
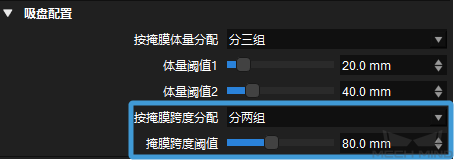
- 默认值:不启用。值列表:不启用、分两组。调节说明:根据掩膜最小外接矩形对角线长度的不同,物体将被分配到不同的组中,各组物体将有不同的吸盘配置。
- 掩膜跨度阈值
- 默认值:80调节说明:如果一个物体的掩膜最小外接矩形对角线长度小于此阈值,则标记为“Short”,否则标记为“Long”。调节示例:如下图所示,当检测到物体长度大于 80mm 时,判定吸盘标签为长,反之为短。
可视化
- 开启
- 默认值:勾选。调节说明:勾选后即可开启可视化,查看选择的可视化属性效果。
- 可视化属性
- 默认值:最终得分。值列表:最终得分、吸盘直径、物体长度、位姿高度。调节说明:选择想要可视化的项。调节示例:
当在可视化属性处选择最终得分时,可视化输出效果如下图所示,其中红色字体处的物体为优先抓取对象。

当在可视化属性处选择吸盘直径时,可视化输出效果如下图所示,其中红色字体处的物体为优先抓取对象。

当在可视化属性处选择物体长度时,可视化输出效果如下图所示,其中红色字体处的物体为优先抓取对象。

当在可视化属性处选择位姿高度时,可视化输出效果如下图所示,其中红色字体处的物体为优先抓取对象。

排序逻辑
- 位姿高度权重
- 默认值:3值列表:1、2、3
- 吸盘大小权重
- 默认值:1值列表:0、1、2、3
- 物体长度权重
- 默认值:1值列表:0、1、2、3
调节说明:为位姿高度、吸盘大小、物体长度设置抓取时的权重后,某项的得分为该项乘其对应的权重值,各项得分相加即为最终得分,机器人将按照最终得分对得分高的物体进行抓取。