将位姿的某个轴指向给定方向¶
功能描述
调整位姿的某个轴,使其指向设定的参考方向。
使用场景
通常用于各类需要调整位姿方向的场景。
此步骤为旧版,如需按照物体的对称性旋转位姿(对应在此步骤中将参数“校正方法”设置为“ROTATION”), 请改用新版步骤 使位姿的轴旋转至指定方向(带对称性约束) ,并与步骤 快捷创建三维向量 搭配使用。
输入与输出
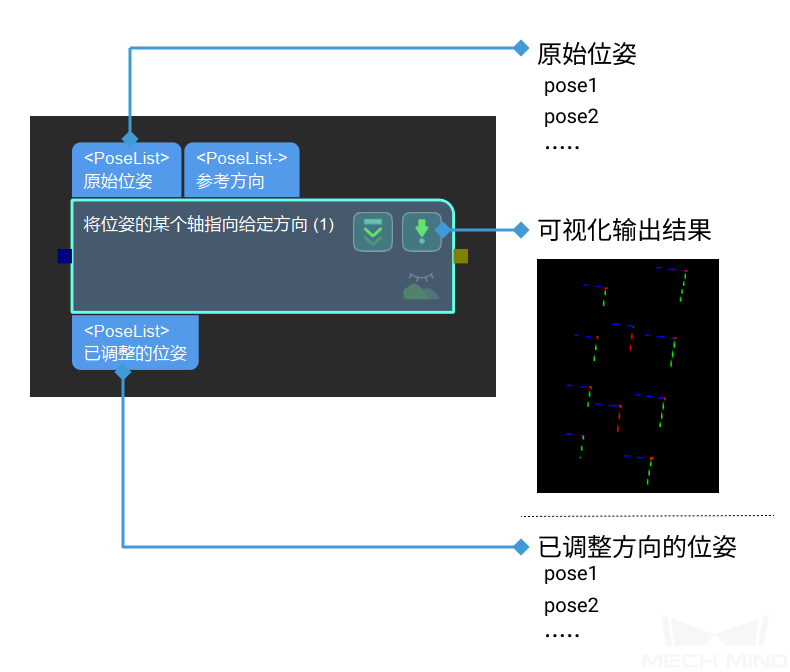
参数说明
- 方法选择
校正方法
HARD_RECTIFY:默认值。如果存在第二个输入(参考位姿),并且勾选 useFirstRefPose,则参考方向为第一个参考位姿对应轴类型的方向;否则使用所有参考位姿对应的轴类型作为参考方向。如果无参考位姿输入,reference Dir决定参考方向。ROTATION:根据物体的对称性,设置对称角度,使待矫正的旋转轴与指定参考轴的方向大体一致。
- 轴设置
待调整轴
调节说明:待矫正的旋转轴。值列表:X;Y;Z(默认值)
- 参考方向(Reference Dir)
x
默认值:0。调节说明:参考轴x的方向向量。y
默认值:0。调节说明:参考轴y的方向向量。z
默认值:1。调节说明:参考轴z的方向向量。
常见用法
可用于固定物体位姿的某个轴向,如正方体物体表面x轴方向为随机指定,而某些机器人夹角无法旋转,造成抓取点不可达。