翻转位姿的坐标轴方向¶
使用场景¶
本步骤通常用于位姿后处理阶段,将位姿的某个轴统一至一个朝向。
输入与输出¶
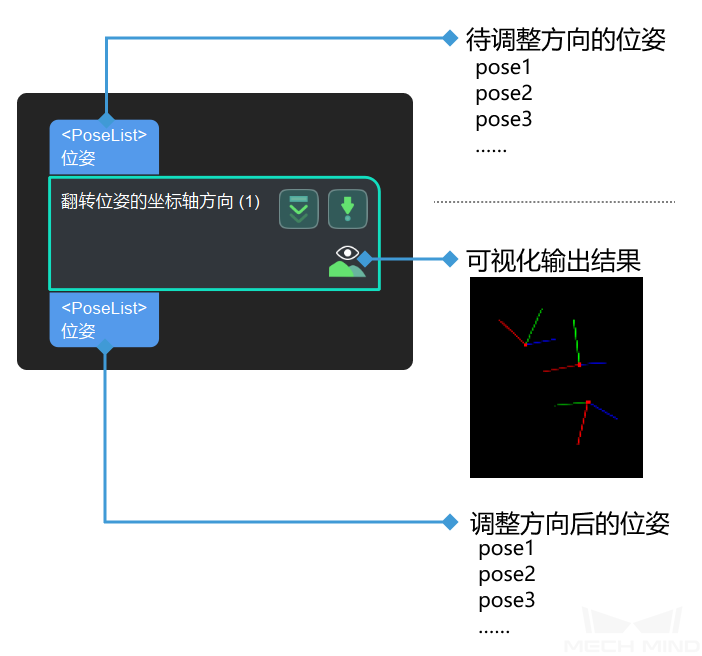
参数说明¶
可视化设置
- 在选定坐标系下显示点云
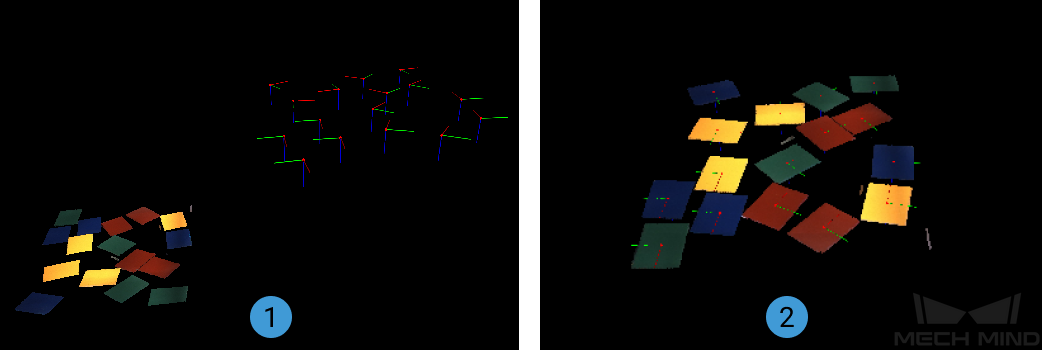
- 默认值:机器人坐标系。值列表:机器人坐标系,相机坐标系(可在调试输出窗口查看点云及坐标)。调节示例:当分别选择相机坐标系和机器人坐标系时,点云显示效果如下图 1 、2 所示。
- 位姿显示设置
- 默认值:只显示输出位姿。值列表:只显示输入位姿,只显示输出位姿,输入与输出一同显示。调节说明:分别显示处理后的位姿(默认)、显示处理前的位姿、显示处理前后的所有位姿。
坐标轴设置
- 需要翻转的轴类型
- 默认值:Z值列表:X;Y;Z调节说明:选择要翻转的轴类型,需要翻转的轴即为待翻转的轴。
- 方向类型
- 默认值:负。值列表:负(想要将位姿的某个轴调整到世界坐标系下的负方向,只有与负方向夹角大于 90° 的轴才会被调整);正(想要将位姿的某个轴调整到世界坐标系下的正方向,只有与正方向夹角大于 90° 的轴才会被调整)。调节说明:待翻转轴的指向。比如,参数中 需要翻转的轴的类型 为 Z ,方向类型为 正 ,此时与世界坐标系 Z 轴正方向夹角小于 90° 的位姿 Z 轴不会被调整,夹角大于 90° 的位姿 Z 轴会绕基准轴翻转 180°。
- 旋转基准轴
- 默认值:X值列表:X;Y;Z调节说明:选择绕哪个轴旋转。
提示
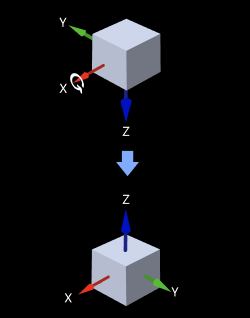
需要翻转的轴与旋转基准轴不能为同一轴。
调节示例:此处以 Z 轴为翻转轴,X 轴为旋转轴为例,如下图所示。