点云处理(GPU)¶
功能描述
计算点云法向量,并可去除离群点。
使用场景
为原始点云增加法向量并去除离群点,通常在 从相机获取图像 、 将深度图转换为点云 步骤之后使用。
提示
此步骤为旧版,请改用新版步骤 计算点云的法向量并滤波 。
输入与输出
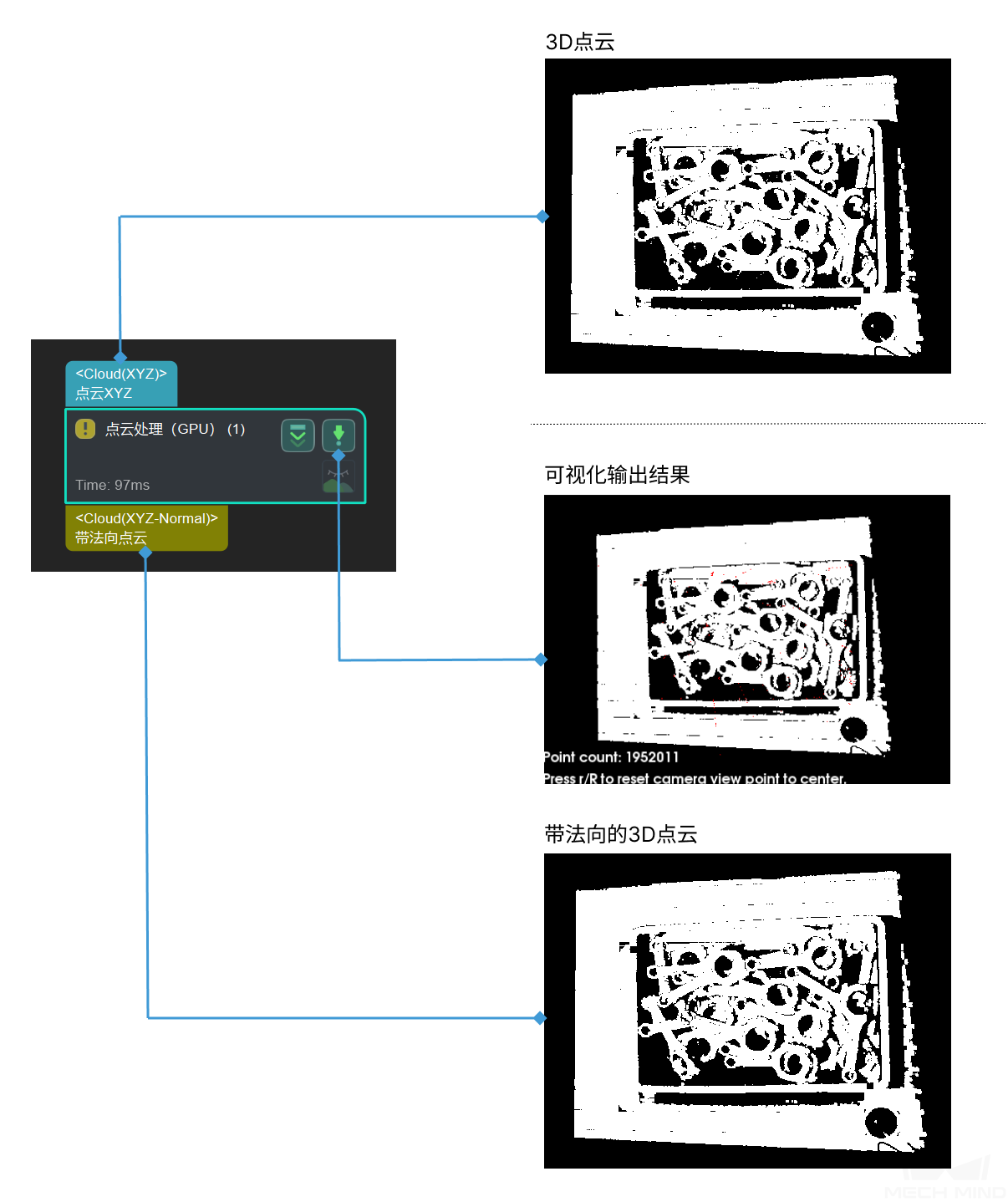
参数说明
- Calculation Settings
是否分批处理:默认选择False。 Cal Norm Radius:默认0.005m。
- Removal of Sparse Points
移除稀疏点:默认选择False。
功能描述
计算点云法向量,并可去除离群点。
使用场景
为原始点云增加法向量并去除离群点,通常在 从相机获取图像 、 将深度图转换为点云 步骤之后使用。
提示
此步骤为旧版,请改用新版步骤 计算点云的法向量并滤波 。
输入与输出
参数说明
是否分批处理:默认选择False。 Cal Norm Radius:默认0.005m。
移除稀疏点:默认选择False。