开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
功能描述
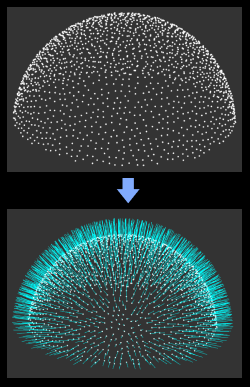
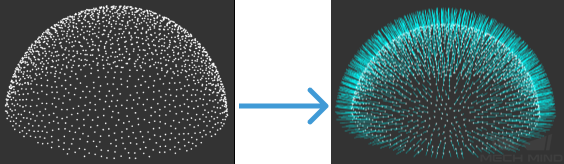
计算点云法向,删除离群点。
使用场景
为原始点云增加法向并去除离群点,通常在“从相机获取图像”、“将深度图转换为点云”步骤之后使用。
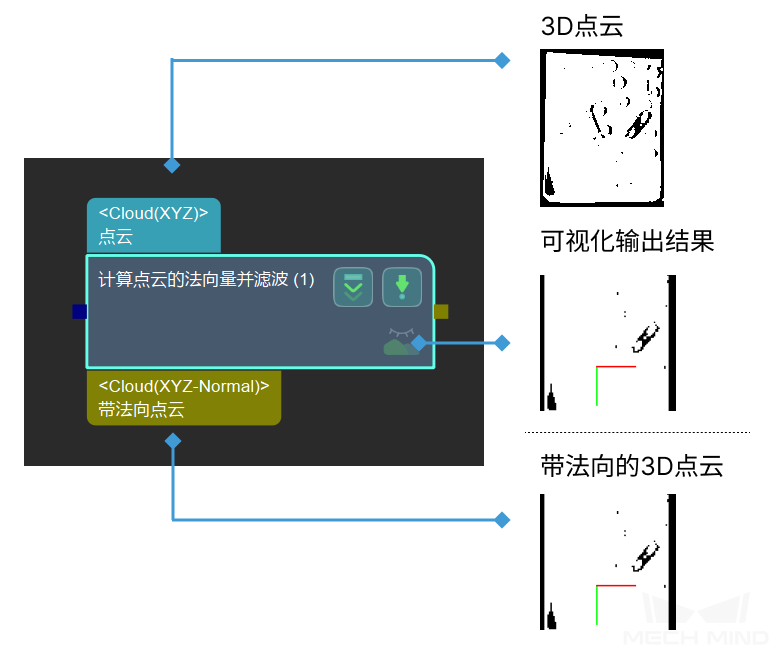
输入与输出