项目部署流程¶
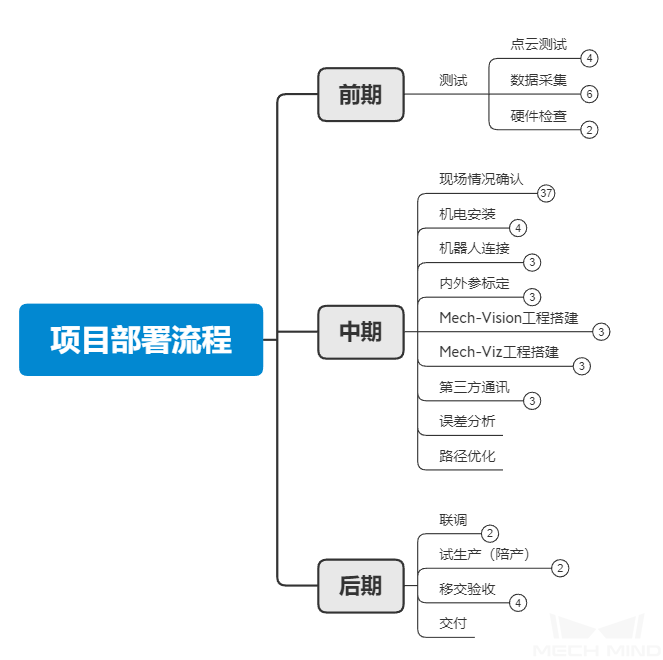
项目部署流程主要分为 前期 、 中期 、 后期 三个阶段。
前期的测试阶段目的是为了测试目标物体是否符合梅卡曼德视觉系统的需求,能不能被成功识别,以及采集相关数据;
中期调试的主要目的是能够让机器人完成既定的工艺流程,并且满足项目需要的节拍;
后期为项目落地阶段,主要为联调,配合工厂生产,满足工厂的生产需求,并在长期的试生产过程中发现并解决存在的小问题。
项目部署流程如下图所示。
项目部署流程¶
前期¶
测试¶
点云测试¶
- 关注重点
关注重点为针对一个工件,需要进行识别时,需要找到的特征,如 圆孔、特殊表面、物体边缘 等。
- 参数调节
明白关注重点以后,在进行点云测试时,可以根据重点调整相机参数,使得重点位置的点云细节变得明显。Mech-Eye Viewer软件点云调节请参考 点云调节
- 简单匹配
一些简单的项目可以直接通过经验来判断;而对于一些复杂工件(无明显特征或特征复杂的工件),可以在实验室搭建一个简单的Mech-Vision工程,以检查是否能够进行匹配,在忽略匹配时间的情况下,是否能够达到预期的效果。同时也能够测试匹配的精度。不同类型的识别工程请参考 典型应用工程使用指南。
- Demo搭建
可以利用实验室现有的机器人,相机和夹具(尖针),并参考 如何建立Demo 章节,搭建一个简单的Demo以给客户展示更加实际的效果。主要目的为直接向客户展示识别效果,以及可达性。
数据采集¶
- 采集需求
对于需要使用深度学习的项目,可能会需要采集数据。针对每一个项目,会有不同的采集需求,如 物品摆放方式,图片采集数量,灯光质量 等。
提示
数据采集时,项目工程师需要按照研发部门发布的 采集规范 来进行,必要时对数据量进行补充。
- 环境控制
在进行数据采集之前,需要对采集环境进行控制。若环境变化,或在较差环境下采集数据,会影响深度学习模型的训练,造成模型效果不理想。在进行数据采集时,主要对相机参数、光照环境和视场进行调节。具体请参考 光照控制。
- 上传数据
在按照 采集规范 采集完成数据以后,则可以对内容进行打包并上传。对于不同批次不同相机采集的数据需要注明。
提示
数据包含的内容为:
原始数据
相机内参文件
中期¶
现场情况确认¶
项目目标确认¶
- 工艺流程
对于一个项目的部署,最主要关注的目标为 节拍 和 项目目标。 节拍即效率,为机器人完成一套工艺流程需要花费的时间。针对不同的项目需求可能有不同的策略和设计。项目目标即需要部署的项目需要完成的内容,如上料、拆垛等,还需要了解更加细节的内容,如抓取或放置方式,姿态,整体精度等。
提示
熟知项目的工艺流程有助于对全局有深层次的了解,能够针对不同的项目工艺流程采取不同的方案策略。
- 时间节点
项目时间节点,即项目进行过程中,开始、部署、联调、试生产、交付所对应的时间。
提示
不同的项目所对应的时间节点不同,了解时间节点能够对工作内容进行合理的安排。展示性质的项目,没有联调、试生产、交付等过程,在时间节点的安排上会有较大不同。
- 控制方式
目前梅卡曼德视觉系统中主要使用的控制方式有两种。一是 Mech-Viz主控 ,二是 机器人主控 。
提示
Mech-Viz主控为常规项目,需要按照部署流程一步一步进行;
机器人主控的项目主要通过Adpater发送视觉点给机器人,机器人收到视觉点后进行解析并进行工作。这类项目完成外参标定、搭建Mech-Vision工程后,不需要搭建Mech-Viz工程。
机器人确认¶
- 能否正常工作
确认机器人是否能够正常工作,主要可以进行的内容有:
检查机器人相关电源线是否连接正常且无破损
检查机器人控制柜是否正常工作
检查示教器是否正常工作
检查机器人控制柜I/O板是否损坏
检查机器人控制柜内部干燥程度
- 软硬件配置
软硬件配置检查的内容主要包括, 软件包权限与版本 和 I/O板。其中,软件包权限与版本需要确认,主要原因为梅卡曼德的机器人适配体系是针对特定软件版本(主流)进行适配,新的或者旧的版本可能会造成通信错误使得机器人无法控制的情况,因此需要对机器人软件版本进行确认,保证版本合适,必要时进行升级或降级。I/O板也需要进行确认的,一些机器人支持多张I/O板,需要进行合理的配置才能够在Mech-Viz中进行控制。
提示
如安川(YASKAWA)机器人在连接不同I/O板时,传递的信号可能不同。
- I/O信号确认
I/O信号确认,主要确认的内容为,需要与视觉系统进行交互的I/O信号。如工件到位信号、夹具开合信号等。
小技巧
在I/O信号较少的情况下,可以直接通过Mech-Viz进行记录;
当项目中需要用到的I/O信号较多的时候,可以列出I/O表。
- 固定方式
固定方式指机器人底座的固定方式。目前主要的固定方式为化学螺栓固定和固定在可移动平台上。机器人固定方式以及可能产生的问题请参考 固定方式 。
- 零点
在机器人长期未使用或经过碰撞后,需要确认机器人零点,防止机器人零点丢失,或数据储存用的电池没电。零点的确认方法请参考 零点 。
- 手摇机器人
手摇机器人的目的为了确定机器人是否可达工作位置。
小技巧
在Eye to Hand模式下,需要手摇机器人到达距离机器人最远处,确认机器人是否可达且不在机器人软限位极限位置;
在Eye in Hand模式下,需要手摇机器人移动机器人分别确认相机拍照位置是否有视野干涉和相机是否会与机器人干涉,还有确定机器人是否能够达到最远处工件位置。
布局确认¶
布局确认的主要内容为,确定 机器人、相机、料筐(料架)等物品 位置是否与图纸中一致,是否会出现机器人的运动受到 相机支架、防护栏、隔离墙等物体 的影响,导致可能出现的 机器人运动路径异常 或 不必要的碰撞 。
夹具确认¶
初步确认机器人夹具是否合适,判断夹具在运动的过程中是否会出现扯断信号线或与机器人干涉的问题。同时,需要确认安装夹具后,是否会对标定有影响。
提示
夹具过长,在标定的过程中,机器人不能在较深的位置标定,则可能影响外参结果,同时也有可能因为夹具而影响相机视野(无法看全标定板)。
电气连接确认¶
- 电
供电方面需要确认的内容为供电是否稳定。在一些工厂由于设计缺陷,导致提供的380V和220V电并不稳定,尤其是220V。因此在连接相机前需要对电压进行确定,若不稳定需要针对相机额外连接稳压器保证相机供电稳定。同时,在一个典型的梅卡曼德视觉系统中,需要使用三脚插头的设备有: 工控机、显示器、路由器、相机 ,一些时候可能同时使用2台相机或者机器人由220V电压进行供电。
小技巧
在配备排插的时候,需准备至少 6 口以上的排插。最后,检查工位整体布局走线是否安全,确保没有直接暴露在外的线缆。在必要的时候使用 理线槽 和 过线槽。
更多供电相关内容可以参考 电源控制 。
- 气
对于气的检查主要针对 气压稳定 和 气压大小 两个内容。其中,气压稳定主要决定了项目是否能够稳定进行。在一些项目中,可能会使用到气泵。当一个气泵被多处使用的时候,则可能出现气压不稳定的情况,从而导致气动夹具无法闭合或者吸嘴吸力时大时小的情况。另外,对于较大的吸盘和气动夹爪的项目,需要额外确认气压大小。气压大小决定了吸盘的吸力大小,是在吸取一些过重物体的时稳定的保证。
相关设备确认¶
机器人在使用的时候,可能会配合使用其他设备或传感器。如 接近传感器、测高传感器、气压检测装置、气泵、安全传感器(光栅、安全门) 等。
危险
在正式调试机器人前,需要对每一个与工位相关的设备进行确认,尤其是对安全传感器进行确认,保证设备的稳定和安全运行。
机电安装¶
- 相机、相机支架安装
在安装相机以及相机支架时,需要按照图纸确定相机支架安装位置以及相机安装方向。在安装时,需要对相机和相机支架进行固定。具体内容请参考 相机安装 。
- 法兰、夹具安装
按照图纸正确安装法兰以及夹具,安装前对于部分轴对称夹具需要确定安装方向,防止反复安装。
- 电气连接
针对部署项目中需要使用到的传感器进行连接并正确配置,对于项目硬件设备如相机、工控机、显示器、路由器等设备进行连接通电测试。
提示
为机器人夹具连接气路时,保证夹具正常工作且气管长度合适,不会因为过短被机器人扯断或过长而不美观。
- 标线、理线
对于使用电线较多的项目,需要使用标签对线材进行标线处理。标线主要针对常用线缆(网线,电源线等)和I/O信号线(正负极、传感器等)。
小技巧
项目中使用的相机线缆和照明用线缆往往过长,因此在布局基本完成后需要对这些线材进行整理,使用扎带对线材进行捆绑并放入理线器中;
针对机器人上的信号线,需要与机器人本体或夹具贴紧,防止被扯断或挂住。
机器人连接¶
- 机器人程序烧录
不同的机器人有不同的适配程序。为了使得机器人能够受到 Mech-Viz 软件控制,需要把适配程序烧录到机器人中。不同机器人的操作方式不同,具体请参考 机器人通信配置 。
- Mech-Center 连接机器人
在使用 Mech-Center 连接机器人前,需要在机器人上进行不同操作以使得机器人处于信号接收阶段,可以参考 机器人通信配置 。Mech-Center 首次连接机器人时,在 Mech-Center 界面中选择 部署设置 进入 Robot Server 选项卡,分别设置 Robot Server路径 和 机器人IP 。并且在Mech-Viz中加载工程并勾选 自动加载当前工程 。随后在Mech-Center界面中点击 连接机器人 即可创建连接。
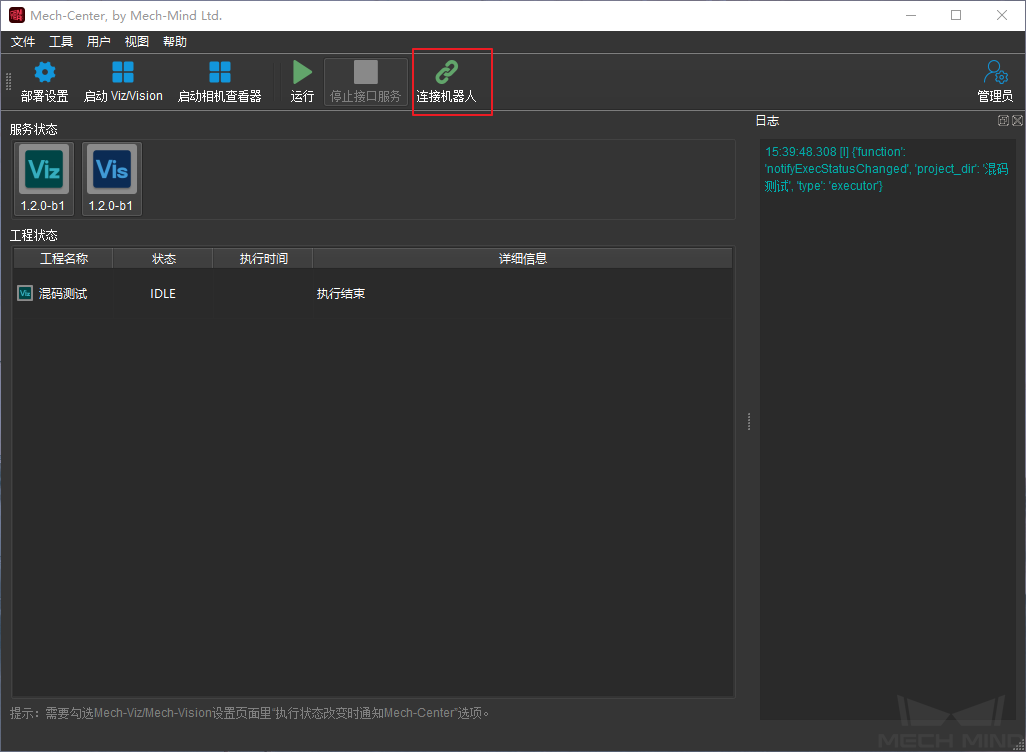
Mech-Center主界面¶

Robot Server设置界面¶
- 运动学参数检查
完成机器人与Mech-Center的连接并同步后,需要打开Mech-Viz软件,对机器人进行运动学参数检查。运动学参数检查的目的主要为 关节角获取正常 和 机器人姿态一致。
内外参标定¶
- 相机参数调节
针对现场工作环境,需要对相机参数进行调节,使得在Mech-Eye Viewer软件中能够清楚地看到标定板平面。
提示
用于外参标定的相机参数往往与识别时不同,在外参标定进行完成后,需要再次调节相机参数使得工件点云清晰。
- 内参检查
相机内参检查请参考 内参检查
- 外参标定
相机外参标定请参考 机器人手眼标定使用指南 章节。
Mech-Vision工程搭建¶
Mech-Vision 工程的搭建需要通过物体的特征(圆孔、平面、凸起等)和点云效果来确定识别思路。Mech-Vision 工程的搭建请参考 典型应用工程使用指南 。完成基本工程搭建以后,可以根据项目的不同需求,修改参数以达到不同的识别效果,具体请参考 步骤使用指南 。若在工程搭建过程中出现错误,也可参考 FAQ 。
Mech-Viz 工程搭建¶
Mech-Viz 工程的搭建需要根据客户需求,考虑机器人运动以及 I/O 信号等内容决定。。
第三方通信¶
在需要与第三方通信的时候,需要尽早确定 通信方式 ,并沟通初步 通信协议 。还需提前进行 Adpater 的编写与测试,保证双方能够正常通信,不因为通信连接而影响项目进度。
后期¶
联调¶
在联调阶段,需要与整条生产线进行配合,进行测试。如替换原来人搬运材料的办法,转而使用传送带运动材料,机器人能够在有人监督的情况下完成一个甚至多个料筐内物体的抓取。在配合阶段,排查过程中可能出现的错误,如节拍跟不上、到位信号没有检测等。
小技巧
为减少繁琐的操作程序,将原有的程序设置为 一键启动 ,从而降低软件复杂程度,降低学习成本,提高易使用性。
试生产(陪产)¶
在试生产阶段的主要原则为:没有大问题 、 解决小问题 。在试生产阶段,应该已经达到项目前期确定的全部需求,且在生产过程中不应出现大问题(机器人停止,识别错误等)。解决全部的小问题,如现场线材布局不够理想,没有标签,点位的微小调整等。
移交验收¶
- 客户培训、操作手册等
对使用软件的客户进行培训,教会基本软件使用、相机标定、问题检查等功能,同时教会客户使用 TeamView软件 和 简单的故障排除 ,方便进行后期维护。制作项目操作手册,帮助客户对照操作手册实现相机拍照与机器人运行。
- 移交清单
编写 项目移交清单 ,确定交付内容,确认并带走 额外采购物品 。
- 软件和工程备份
进行 软件和工程备份 ,确定当前使用的Mech-Viz软件和Mech-Vision软件的 版本 和备份现场所使用的的 工程以及原图 ,方便后期进行调试与维护和分享学习。
- 项目总结
进行合理且适当的 项目总结 ,记录项目进行过程中遇到的问题以及相关的解决办法、使用到的不常用技巧,有助于帮助其他工程师进行学习,提高整体的调试与部署水平。