Eye To Eye¶
2台カメラキャリブレーションを実行し、2台のカメラの間の位置姿勢関係を確立します。図1に示すように、Eye To Eye方法を使用して、カメラの視野を拡大し、かつ2台カメラの視野の重複する部分の点群の品質を向上させます。
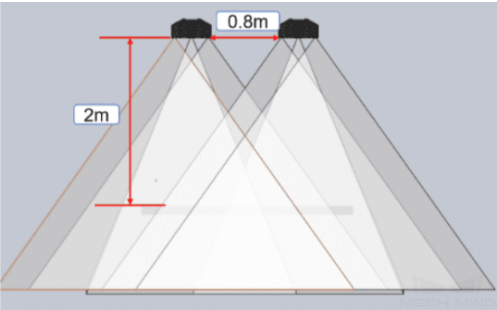
図1 2台のカメラの視野¶
ランダムな複数キャリブレーションボード位置姿勢
キャリブレーションを実行する前提:使用する2台のカメラは同じ解像度です。また、カメラの視野(2D&3D)の重複エリアが作業エリア全体をカバーします。
Mech-Vizまたはコントロールハンドルを使用してロボットを動かし、2台のカメラの視野の重複エリアの中央にキャリブレーションボードを放置します。その後、カメラにそれぞれ接続して画像をキャプチャし、視野内のキャリブレーションボードの位置を確認します。 カメラヘルパー ‣ カメラキャリブレーション を順次に選択し、キャリブレーションプリセットのインターフェイスに入ります。校正点を追加する方法は、「ランダムな複数キャリブレーションボード位置姿勢」を選択します。図2に示すように、キャリブレーション方法は、「Eye To Eye」を選択します。
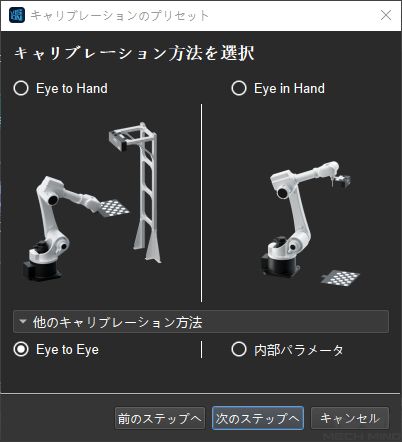
図2 キャリブレーション方法を選択¶
図3に示すように、キャリブレーションインターフェイスに入った後、2台のカメラに接続し、そのうちの1台をメインカメラとして設定します。

図3 メインカメラを設定¶
次に、Eye To Hand の「ランダムな複数キャリブレーションボード位置姿勢」方法に従ってキャリブレーションします。メインカメラのデータはインターフェースに表示され、サブカメラのデータは同時に生成されます。キャリブレーション完了後、2台のカメラの外部パラメータデータが同時に生成されます。これで、Eye To Eyeキャリブレーションは完了です。
外部パラメータによる直接計算
Eye To Eye方式で2台のカメラの外部パラメータを校正した後、Eye To Eye方式で2台のカメラ間の位置姿勢の関係を計算します。「カメラキャリブレーション」をクリックし、「Eye To Eye」を選択します。図4に示すように、「校正点の追加方法を選択」で「外部パラメータによる直接計算」を選択し、校正された外部パラメータデータをそれぞれ選択します。
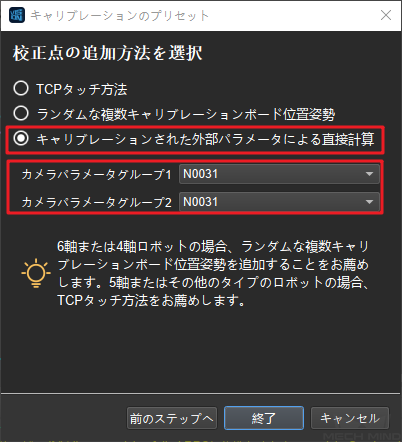
図4 校正点の追加方法の選択¶
設定後、キャリブレーションインターフェイスに入り、カメラに接続せずに、「カメラのパラメータを計算」に入ります。図5に示すように、カメラのパラメータを計算 をクリックして、2台のカメラの位置姿勢関係を取得します。Mech-Vizで現在の点群を表示 をクリックし、マージされた点群を生成します。点群のマージ効果が良くない場合、2台のカメラの外部パラメータを再校正する必要があります。
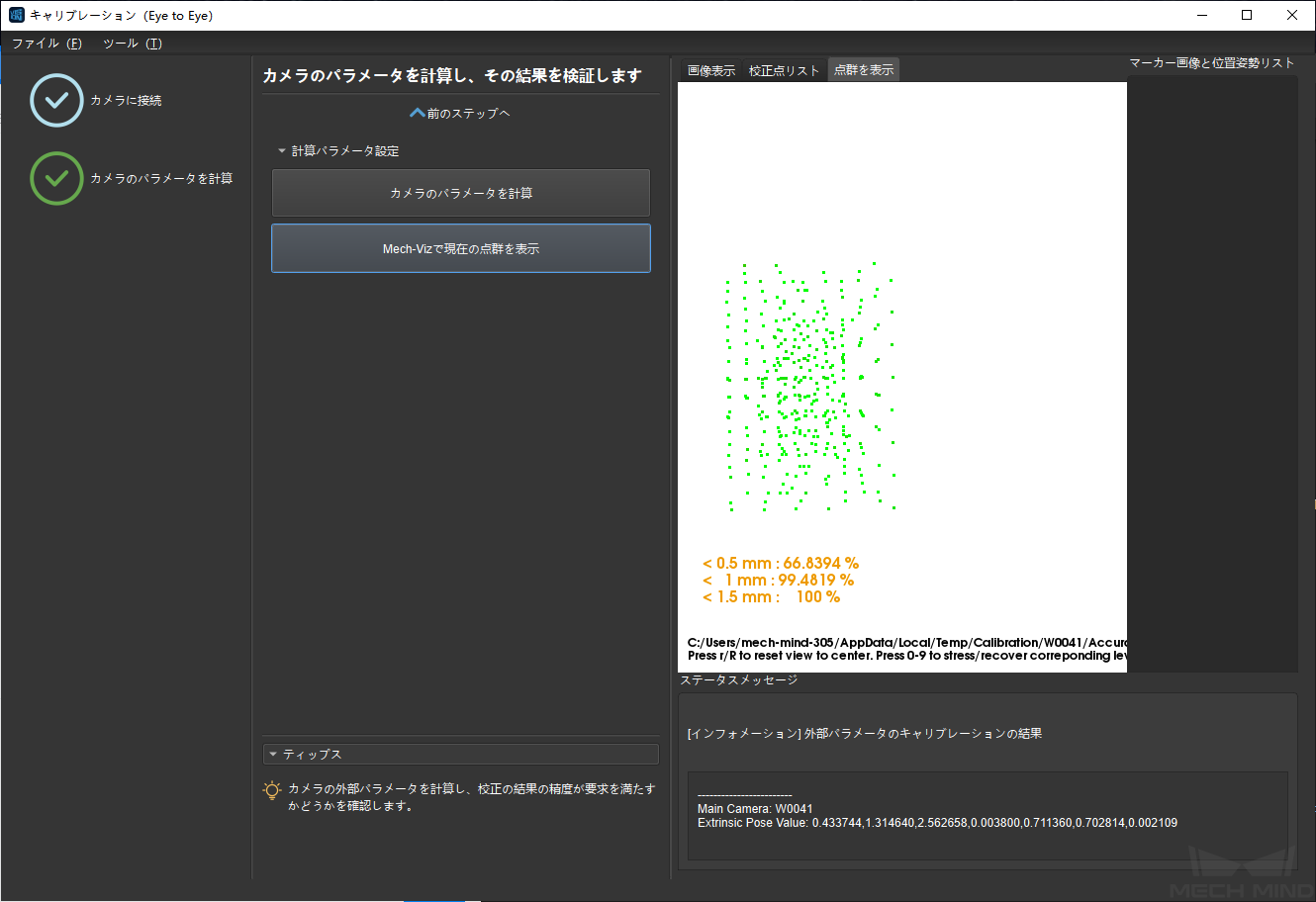
図5 点群表示¶
Mech-Visionでプロジェクトを構築することで2台のカメラのキャリブレーションによる点群マージの効果を確認
プロジェクトの構築は、図6に示します。「出力がないとき、制御フローをトリガー」と「出力があるとき、制御フローをトリガー」をチェックしてください。
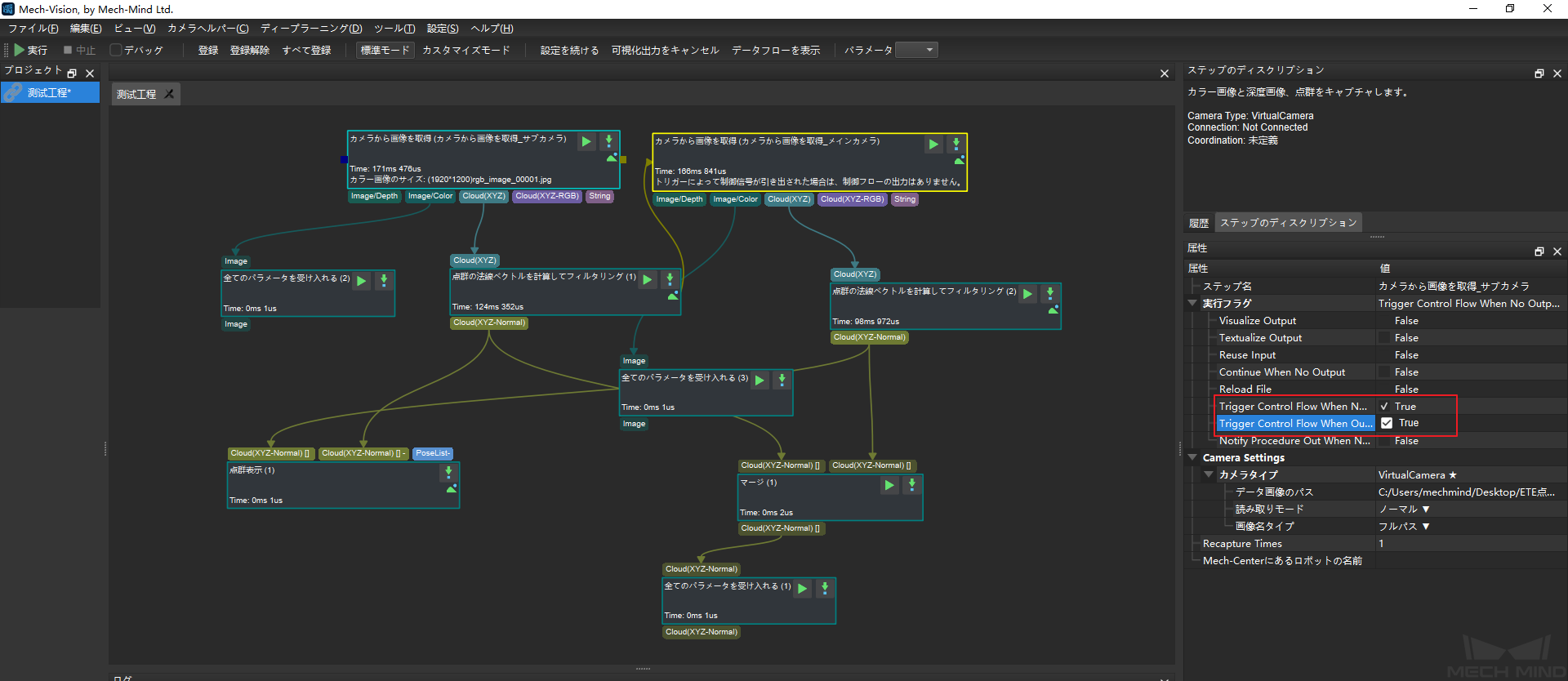
図6 プロジェクト構築¶
「データをマージ」ステップをシングル実行して、マージされた点群を表示します。図7に示すように、出力されるのはマージされた全体の点群です。同時に、左上隅の View as Whole| 1 | 2 をクリックして、点群を切り替えます。
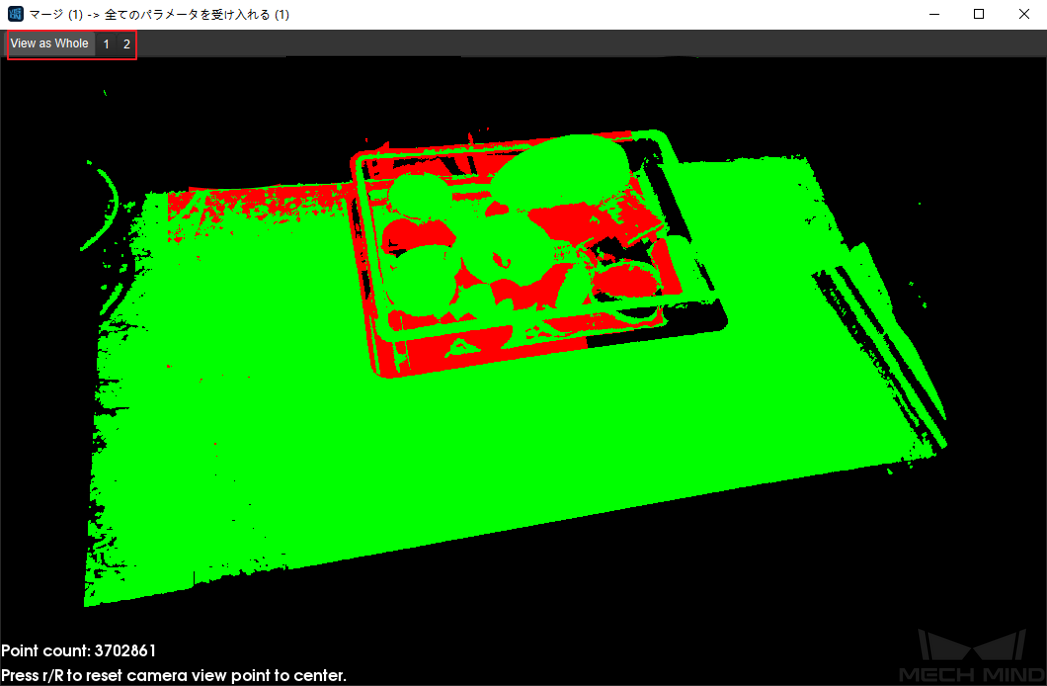
図7 点群をマージ¶