一般的なマッチングソリューションにおけるMech-Visionプロジェクト構築のまとめ¶
一般的なマッチングソリューションは、純粋なマッチング、ディープラーニング+マッチングの2つに分けられます。2つの違いは、マッチング前に点群エリアを選択する方法にあります。
純粋なマッチングソリューションには、点群領域は通常、点群処理に従って選択されます。
ディープラーニング+マッチングのソリューションには、点群領域はディープラーニングで認識されたマスクによって選択されます。
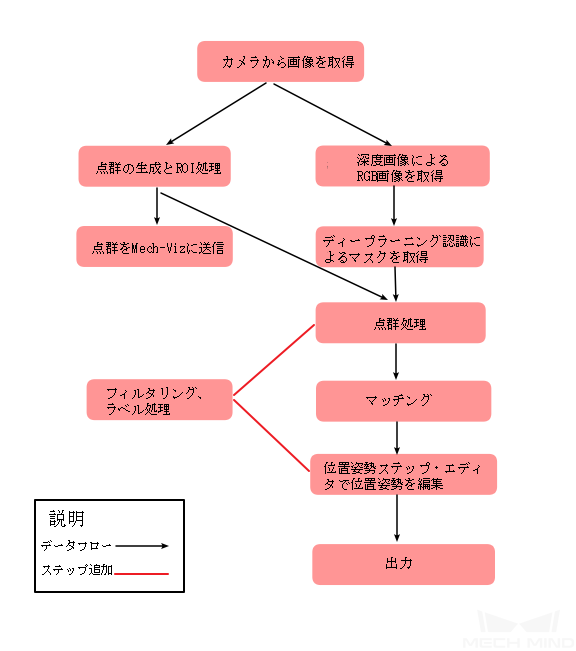
一般的に使用されるマッチングソリューションのMech-Visionプロジェクトの構造は次の通りです。
カメラから画像を取得 :カメラのデータ(カラー画像、深度画像を含む)を取得します。実際の状況に応じて対応するカメラパラメータを選択するまたは入力します。
点群前処理 :深度画像を点群に変換し、点群の法線ベクトルを計算して、ROI内のフィルタリングした点群を抽出します。
点群を外部サービスに送信 :深度画像から変換された点群(XYZ-RGB)をMech-Vizソフトウェアに送信して可視化します。
点群処理:点群を処理および最適化して、マッチング要件を満たすことができるようにします。
位置姿勢ステップ・エディタ で位置姿勢を編集:マッチングした出力結果をMech-Vizに直接送信して操作することはできなく、座標系の変換、位置姿勢の調整やソートなどの処理が必要です。 位置姿勢ステップ・エディタ により、位置姿勢をすばやく編集することができます。
出力 :Mech-Visionの結果をMech-Vizに出力します。