カメラから画像を取得¶
機能のディスクリプション¶
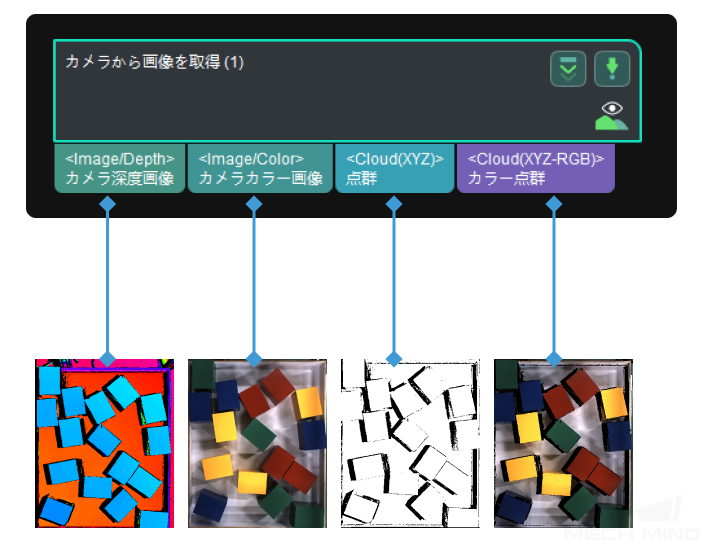
実際のカメラまたは仮想カメラからカラー画像、深度画像および点群を取得します。
使用シーン¶
通常、ビジョンプロジェクトの初期入力として使用されます。Mech-Eyeシリーズのカメラ、サードパーティ製のカメラからデータを取得し、または仮想カメラからのシミュレートされたデータソースを使用します。
入力と出力¶
パラメータの調整説明¶
実際カメラを使用¶
カメラ設定
- カメラタイプ
- 初期値:Mech-Eyeオプション:External2D、LMI、Mech-EyeTOF、Mech-Eye調整説明:実際カメラに接続する場合、対応するカメラタイプを選択する必要があります。
注意
カメラのファームウェアバージョンを2.0.0以降にアップデートした後は、1.6.2以降バージョンのMech-Visionを使用することをお勧めします。1.6.1以前バージョンのMech-Visionを使用する場合、 External2D EBUSCamera でカメラに接続するとソフトウェアがクラッシュする可能性があります。
- カメラID
- 初期値:CAM00000調整説明:ボタン カメラを選択 をクリックして、表示された画面で接続するカメラと対応するパラメータグループを選択すると、カメラIDは自動的に取得されます。
まず、表示される画面で接続するカメラを選択し、
 をクリックします。
をクリックします。
カメラが正常に接続されると、
ボタンが  に変わります。次に、 パラメータグループを選択 ドロップダウンリストでカメラのパラメータグループを選択します。
に変わります。次に、 パラメータグループを選択 ドロップダウンリストでカメラのパラメータグループを選択します。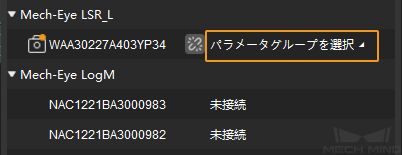
パラメータグループが選択されたら、下図のようになります。

最後に、カメラが正常に接続され、パラメータグループが選択されると、下図のようにカメラIDとキャリブレーションパラメータグループが自動的に入力されます。
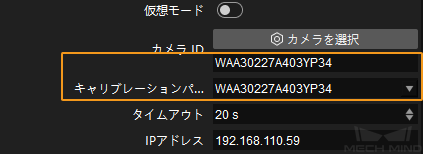
- キャリブレーションパラメータグループ
- 上図に示すように、カメラIDを設定した後に自動的に入力されます。
- タイムアウト
- 初期値:20s調整説明:設定した時間にカメラは画像を取得できなかったらタイムアウトとします。この場合にカメラは再スキャンします。連続して三回もタイムアウトしたら異常のメッセージが出ます。
- IPアドレス
- 初期値:127.0.0.1調整説明:カメラの実際のIPアドレスです。カメラが正常に接続され、パラメータグループが選択されると、IPアドレスが自動的に入力されます。
- カメラ型番
- 初期値:Unknown調整説明:接続されたカメラに応じて、対応する「カメラ型番」が自動的に取得されます(このパラメータは変更できません)。
- 2D画像のソース
- 初期値:テクスチャ画像。オプション:テクスチャ画像、外部カラー画像。調整説明:LSRシリーズカメラ(現在はLSRおよびDEEPが含まれます)を使用する場合、必要に応じて「2D画像のソース」を選択できます。テクスチャ画像は古いバージョンのLaserカメラと一致しており、2D白黒画像で表し、補正する必要はありません。また、深度画像と同じ座標系にあります。外部カラー画像は、カメラの外部2Dカラー カメラによって取得された画像であり、使用する前に画像を補正する必要があります。
- 深度画像の座標系に補正
- 初期値:チェックを入れない。調整説明:2D画像のソースを 外部カラー画像 に設定する場合にのみ表示されます。これは、外部カラー画像を深度画像の座標系に補正するために使用されます。
再撮影回数
初期値:3推奨値:3調整説明:ステップ実行中の撮影枚数の上限です。撮影に失敗した場合も、一回取得と見なされます。
Mech-Centerにあるロボットの名前
初期値:なし。調整説明:ロボットサービスの名前を入力し、Mech-Centerに接続されているロボットの名前および型番と一致する必要があります。
仮想カメラを使用¶
カメラ設定
- 仮想モード
- 初期値:チェックを入れない。調整説明:ローカルのシミュレーションデータを使用する必要がある場合は、このパラメータにチェックを入れます。
- キャリブレーションパラメータグループ
- 調整説明:画像のデータパスを選択したら、 キャリブレーションパラメータグループ が自動的に自動的に入力されます。 データパス に複数の キャリブレーションパラメータグループがある場合、このオプションのドロップダウンリストから使用するキャリブレーションパラメータグループを選択できます。
- データパス
- 調整説明:右側にある
 をクリックして、データフォルダを選択します。
をクリックして、データフォルダを選択します。ヒント
データフォルダを選択するとき、以下の場合で 仮想カメラアシスタント がトリガーされます。
データフォルダのパスが空である場合。
選択されたデータフォルダには複数グループのデータがある場合。
選択されデータフォルダにはカラー画像や深度画像、内部・外部パラメータデータが欠落している場合。
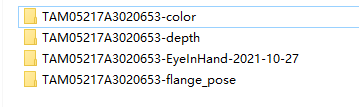
カメラの取り付け方式はEye in Handである場合、フォルダ内の標準画像データ形式は下図のようになります。
選択されたデータフォルダパスが空である場合、このステップを実行した後、表示される 仮想カメラアシスタント の画面で
 をクリックしてデータパスを選択したら、カメラID、パラメータグループは自動的に入力されます。次に 検証 をクリックすると、 カメラパラメータグループが更新されました。 というメッセージが表示されます。
をクリックしてデータパスを選択したら、カメラID、パラメータグループは自動的に入力されます。次に 検証 をクリックすると、 カメラパラメータグループが更新されました。 というメッセージが表示されます。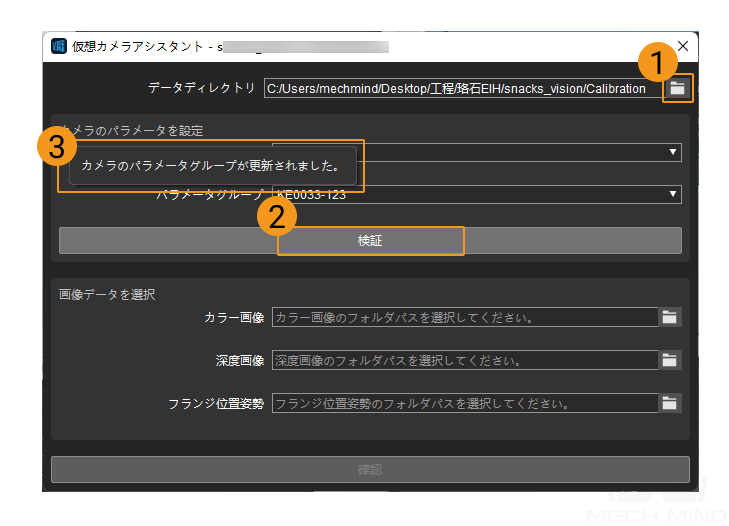
そして、
をクリックして画像データが格納されているフォルダ、つまりカラー画像、深度画像およびフランジ位置姿勢を選択する必要があります。選択したら、 確認 をクリックします。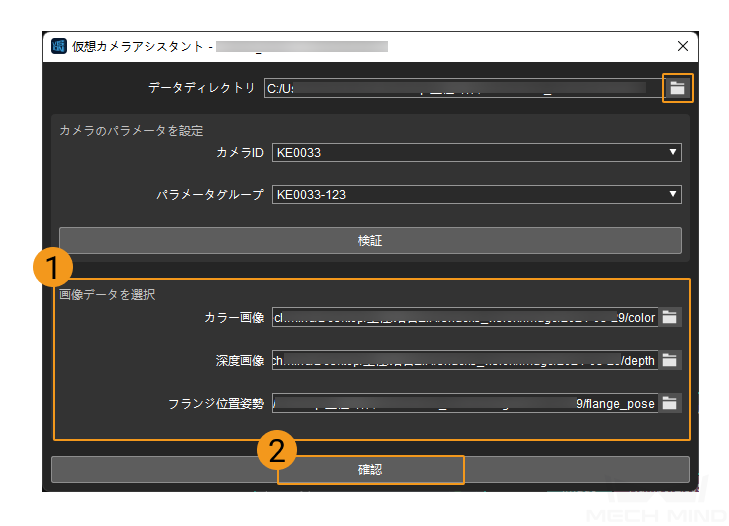
最後に、表示される 設定済み の画面で OK をクリックして、仮想カメラアの設定を完了します。
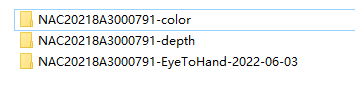
カメラの取り付け方式はEye to Handである場合、フォルダ内の標準画像データ形式は下図のようになります。
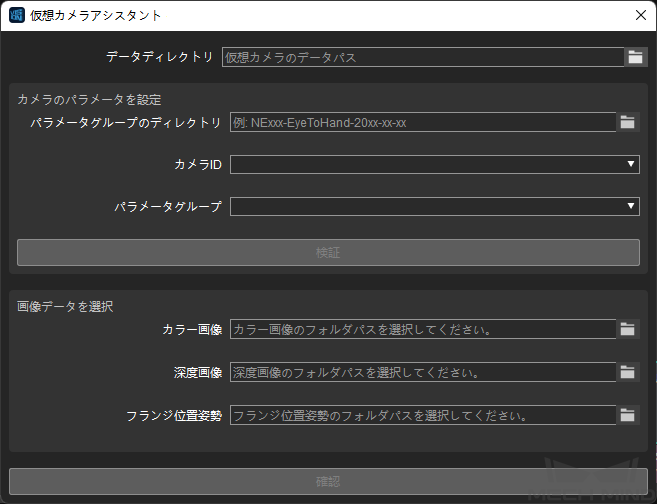
仮想カメラアシスタントの画面を下図に示します。Eye to Handのカメラの取り付け方式を使用したプロジェクトのデータパス選択方法については、上記をご参照ください。
- プレイモード
- 初期値:順次読み込み。オプション:順次読み込み、1つ繰り返し、すべて繰り返し、ランダム読み込み。調整説明:実際のニーズに応じて選択してください。
- 現在のフレーム
- 調整説明:現在読み込まれている画像番号とタイムスタンプを表示するために使用されます。
注意
仮想モードでデータパス内の画像データが変更された場合は、データパスを再選択して、完全な画像データを再読み込みしてください。データが表示されないのは、このステップで画像データを動的に読み取ることができないためです。