Individual control mode for combined suction cup¶
The individual control mode for combined suction cup supports a single suction cup unit as a circle or a rectangle. The parameters of suction cup are written in the suction cup configuration file. The configuration file is json file format, which includes information about the size of a single suction cup, the number of rows and columns of the combined suction cup, the corresponding DO port and etc.
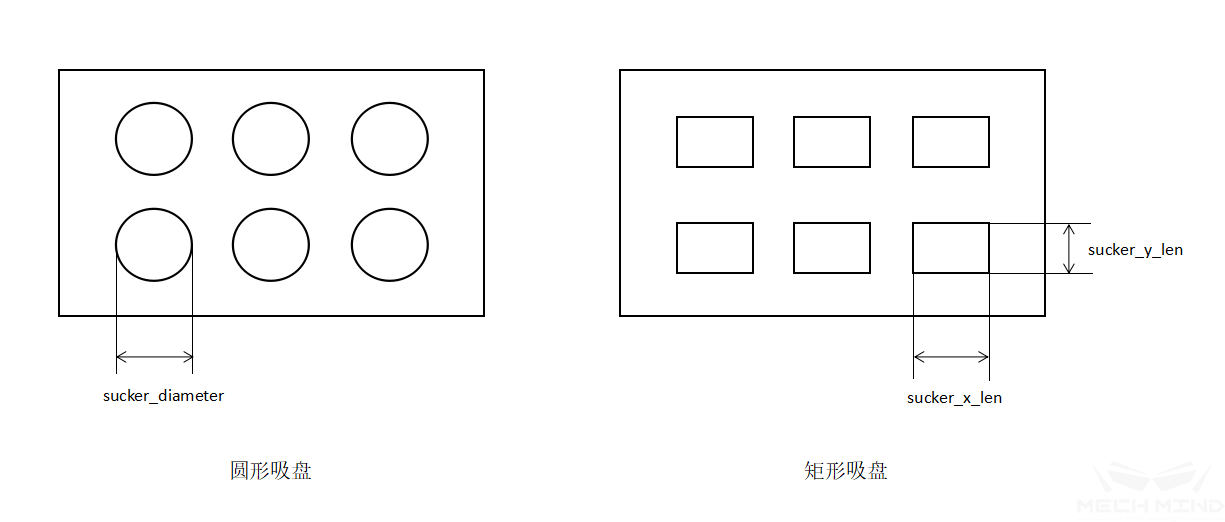
If the suction cup is round, use sucker_diameter as the suction cup diameter;
If the suction cup is rectangular, use sucker_x_len and sucker_y_len to indicate the length in the x and y directions of a single suction cup unit in the tcp coordinate system respectively.
Attention
When the suction cup offset is calculated by Mech-Viz, the picking pose will be recalculated. In IndependentCtrl mode, the object must be strictly larger than the smallest suction cup unit, otherwise the software will not calculate the visual grasping point and report a “no pose” error.
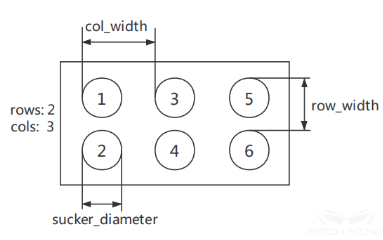
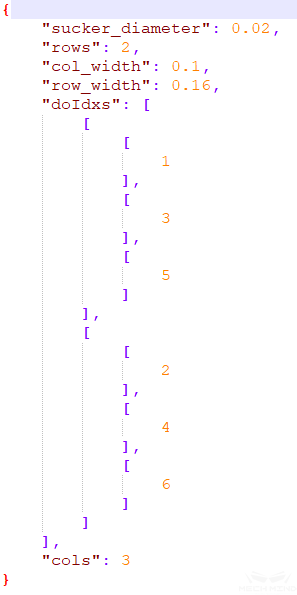
The combination of 6 round suction cups as an example. When a single suction cup can be independently controlled, the configuration file is as shown in the figure. The number in doIdxs is the DO port number of the actual control
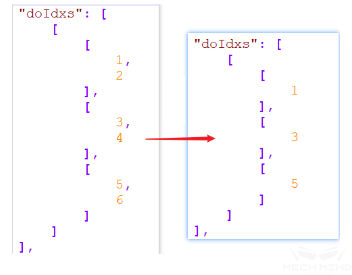
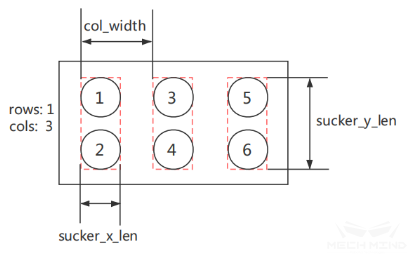
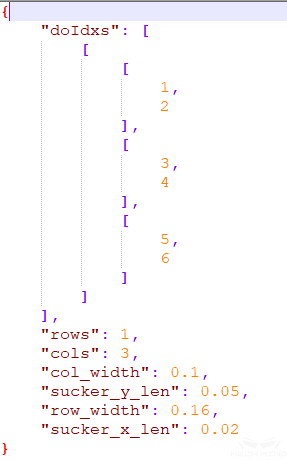
In practical applications, the suction cups cannot be controlled independently, and some small combinations can be made. The following figure is an example. It is not practical to use only a single suction cup to grasping the box. You can only use the combination of suction cups by pressing the red frame. The suction cup can be regarded as the smallest unit at this time, and it changes from two rows and three columns to one row and three columns. The corresponding configuration file is shown in the figure.
Note
Currently, only the adjacent suction cups are allowed to combined into rectangular suction cup units. Other special combinations are not supported.
If DO port 1 can control suction cups 1 and 2, DO port 3 can control suction cups 3 and 4, and DO port 5 can control suction cups 5 and 6, the editable json file is as follows: