 update_picked_obj¶
update_picked_obj¶
Description¶
Update the size and pose of the grasped object by second-detection
Parameters¶
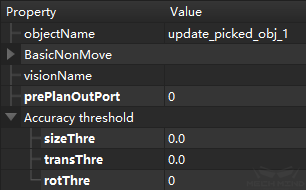
- BasicNonMove
- visionName
The vision project name to second detect
- prePlanOutPort
Default is 0, mudule will output from the left port “NoNeedUpdate” to speed up the project. It can be set to -1 if it is not neccessary to preplan.
- Accuracy threshold
sizeThre/transThre/rotThre:if the size/translations/rotation of box are all smaller than the specified threshold, it will be considered as the same, this module will output from the left port “NoNeedUpdate”