 classify¶
classify¶
Description¶
Run to different branches according to the object label corresponding to the actual grasp pose given by visual_move
Parameters¶
- BasicNonMove
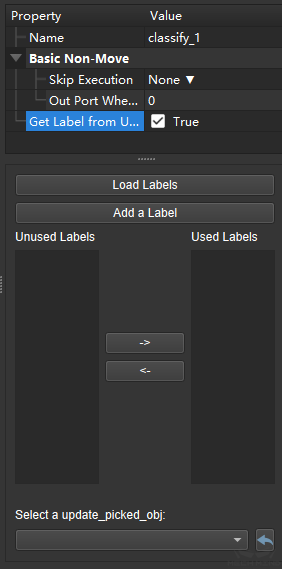
- getLabelFromUpdatePickedObj
Usage scenario: The label of grasp object can not be acquired from visual_move , it is acquired from second-time detection by update_picked_obj Once it is checked as True, the drop-down list Select a update_picked_obj will appear in the bottom, as shown in the picture, select the module name which need to be classified.
- Load Labels
Choose the labels.json file to load the predefined labels. Click
 or
or  can add or delete corresponding port of labels
can add or delete corresponding port of labels
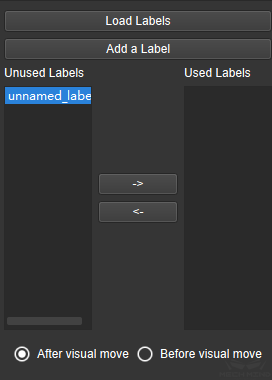
- After visual move
Default unselected, it can be choose when the objects need to be placed in different position according to labels after picking. According to the object label corresponding to the actual grasp pose given by visual_move , the program will run into different branch
- Before visual move
If the grasping depends on the labels given by current detection so that using different end effectors, this function can be choose. Due to this function is relate to the actual picked object’s label given by subsequent visual_move , the dependent module need to be selected in the drop-down list Select a visual_move