 transfer_control¶
transfer_control¶
Description¶
This Skill is used to temporarily transfer control to the robot and wait to continue to control the robot.
Parameters¶
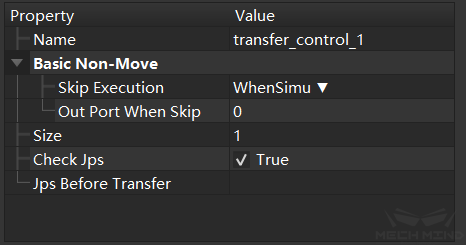
- BasicNonMove
See Other General Parameters for details.
- Size
The number of output ports.
- Check Jps
Whether to check the joint angle of the robot before transferring control.
- Jps Before Transfer
This option will only appear when the Check Jps option is checked. You need to enter the Jps value required to check the Jps.