 payload¶
payload¶
Description¶
This module is used for setting the payload of robot
Parameters¶
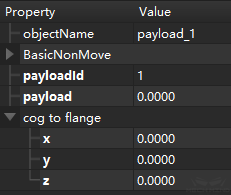
- BasicNonMove
- payloadId
If there exists multiple payloads, the index of payload in use need to be specified.
- payload
Fill the maximum payload including end effector and objects(kg)
- cog to flange
x/y/z: Set the center of gravity of load in the flange coordinate system.(According to the brand of robot, not required)