 set_robotiq¶
set_robotiq¶
Description¶
This module enables the RobotIQ gripper to be controlled directly through Mech-Viz. RobotIQ gripper is controlled by serial port based on modbus protocol, PC or IPC can control its position/speed/force through 485 serial port (or USB to 485)
Parameters¶
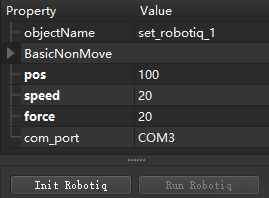
- BasicNonMove
- pos
Range: 0~255; 0 is the state where the jaws are opened the most
- speed
Action speed, range: 0~255.
- force
Torque, range: 0~255.
- comPort
The cluster communication port number connected to RobotIQ, it can be viewed in the device manager
- Init Robotiq
Initialize the COM connection, it will be initialized automatically during running and simulation
- Run Robotiq
After connecting with RobotIq, you can click this button, it will move the gripper according to the set parameters to preview