Point Axes of Poses to Given Direction¶
Function
Adjust the orientations of axes of poses by a set reference direction.
Sample Scenario
For various scenarios where pose orientations need to be adjusted. This Step belongs to an earlier version. If you need to rotate poses by object symmetricity (that is, to set the parameter Rectification Method of this Step to ROTATION), please instead use the newer Step Rotate Poses to Directions with Symmetry Constraint and use it with the Step Easy Create Vector3Ds.
Input and Output
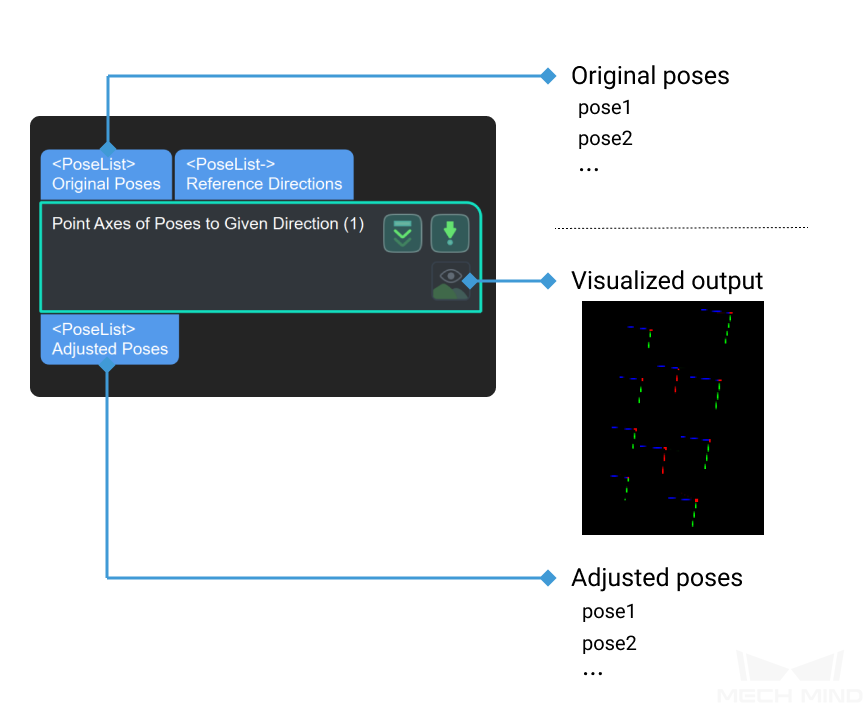
Parameters
method
rectifyMethod
Default Value: HARD_RECTIFYList of Values: HARD_RECTIFY, ROTATIONHARD_RECTIFY
If there exist a second input (reference pose), and useFirstRefPose is selected, the reference direction is the direction of the corresponding axis type of the first reference pose; otherwise, using all reference poses’ corresponding axis type. If there isn’t a second input (reference pose), “reference Dir” determines the reference direction.
ROTATION
According to the symmetry of the object, set the symmetrical angle so that the direction of the rotation axis is roughly consistent with the specified reference axis after rectification.
axis
axisType
Default Value: ZList of Values: X, Y, ZInstruction: The rotation axis to be rectified.used by rotation method
symmetryAngle
Default Value: ZList of Values: X, Y, ZInstruction: reference axis.useFirstRefPose
Default Value: ZList of Values: X, Y, ZInstruction: It can be modified only when there exist a second input (reference pose). Select the reference direction using the first reference pose.reference direction
x
Default Value: 0Instruction: The direction vector of the reference axis x.y
Default Value: 0Instruction: The direction vector of reference axis y.z
Default Value: 1Instruction: The direction vector of the reference axis z.
Typical case
It can be used to fix a certain axis of the object’s pose. For example, the x-axis direction of the cube object is randomly set, and some robots can’t rotate their grippers to certain angle, causing the unreachable pick point.