TCP/IP¶
本節では、TCP/IPの通信設定について説明します。その前に、 ロボットを選択 し、通信設定画面に入っていることを確認します。
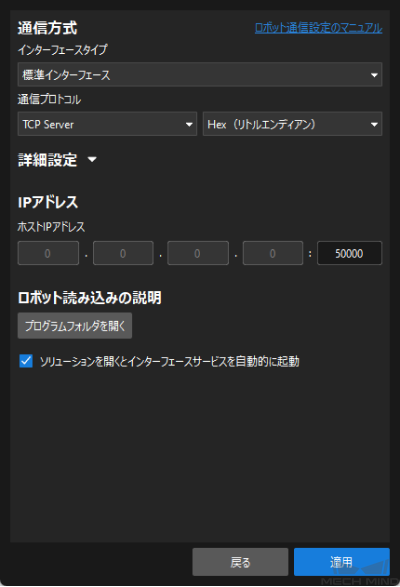
通信方式 で、インターフェースタイプを 標準インターフェース に、通信プロトコルを TCP Server に設定します。通信プロトコルの形式は、下表に従って選択します。
ロボット
通信プロトコル
ABB
HEX(リトルエンディアン)
FANUC
HEX(ビッグエンディアン)
KUKA
HEX(リトルエンディアン)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
NACHI
ASCII
その他
ユーザーはロボット側の通信プログラムを作成する必要があるので、ロボットが対応しているHEX、ASCIIに応じてプロトコル形式を決定することができます。
IPアドレス でホストポート番号を設定します。
注釈
ホストポート番号を50000以上に設定することを推奨します。
ソリューションを開くとインターフェースサービスを自動的に起動 オプションを選択可能です。チェックを入れると、次回ソリューションを開く時に インターフェースサービスを起動 する必要はありません。
適用 をクリックします。
インターフェースサービスを起動 します。
その後、選択したロボットに応じて以下の操作を実行します。
選択されたロボットが以下のブランドの場合、対応するマニュアルを参照して操作してください。
ロボット
マニュアル
ABB
FANUC
FANUC CRX
Kawasaki
KUKA
YASKAWA
UR
TM
ELITE
JAKA
選択したロボットが上記以外のブランドの場合、 標準インターフェース開発者向けマニュアル を参照してロボット側の通信プログラムを作成します。 キャリブレーションについては、対応するロボットの Vizとの通信プログラムの読み込み を参照し、 自動キャリブレーション を完成させてください。
選択したロボットがそのほかのロボットである場合、 標準インターフェース開発者向けマニュアル を参照してロボット側の通信プログラムを作成します。 キャリブレーションについては、 手動キャリブレーション を参照して実行してください。