ロボットの選択¶
本節では、ロボットの選択方法について説明します。
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
ロボットを選択します。
適応可能なロボットを選択
ロボットを選択 のドロップダウンボックスをクリックし、 適応可能なロボット を選択して、 ロボット型番を選択 をクリックします。
ロボットブランド のドロップダウンボックスで、ロボットブランドを選択すると、そのブランドのすべてのロボットが右側に表示されます。
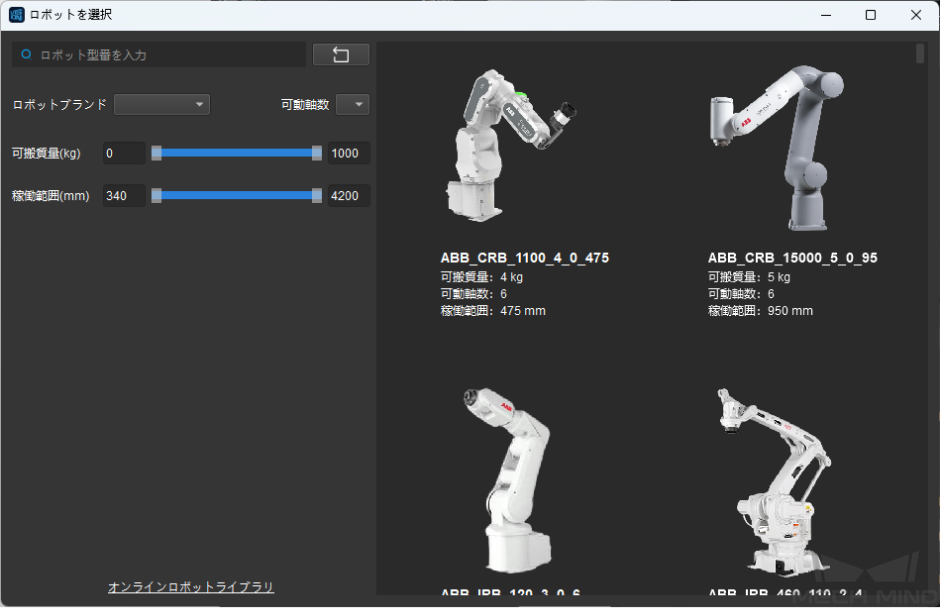
ちなみに
可動軸数 、 可搬質量 、 稼働範囲 を選択してロボットを検索できます。
検索ボックス にロボットブランドと型番(英語は大文字小文字を区別しません)を入力し、ロボットも検索することができます。
 をクリックすると、入力ボックスがクリアされます。
をクリックすると、入力ボックスがクリアされます。
注意
ロボットライブラリに必要なロボットがない場合があります。この時、 ロボットをインポート してから、ここで操作を行います。
右側の選択するロボットにカーソルを合わせると、オフホワイト色の枠と 選択 ボタンが表示されますので、それをクリックします。
次へ をクリックし、 通信方式の設定 画面に入ります。
その他のロボットを選択(直行ロボットなど)
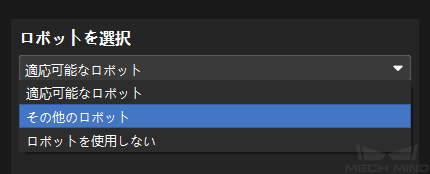
ロボットを選択 のドロップダウンボックスをクリックし、 その他のロボット を選択します。
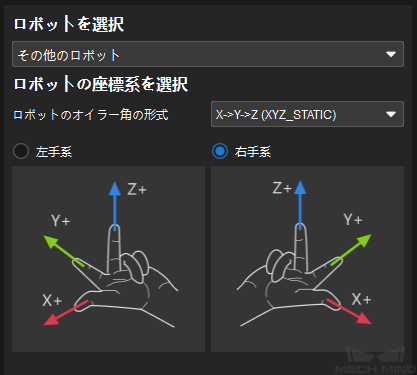
ロボットのオイラー角の形式を選択します。
ロボットの座標系を選択します。
次へ をクリックし、 通信方式の設定 画面に入ります。
ロボットを使用しない(計測など、ロボットが必要としない場合に対応)
ロボットを選択 のドロップダウンボックスをクリックし、 ロボットを使用しない を選択します。
次へ をクリックし、 Adapter通信設定 の画面に入ります。
注意
ロボットを使用しない を選択した場合、通信方式はAdapter通信のみ選択可能です。