Adapter通信設定¶
本節では、Adapterの通信設定について説明します。その前に、 ロボットを選択 し、通信設定画面に入っていることを確認します。
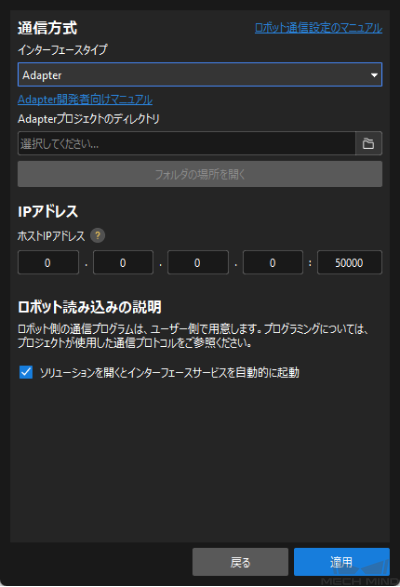
通信方式 で、インターフェースタイプを Adapter に設定します。
 をクリックし、Adapterプロジェクトフォルダを選択します。
をクリックし、Adapterプロジェクトフォルダを選択します。注意
ユーザは事前にAdapterプログラムを作成する必要があります。詳細については、 Adapterプログラミングガイド をご参照ください。
IPアドレス でホストIPアドレスとポート番号を設定します。
注釈
ホストIPは、ロボットIPと同じネットワークセグメントにある必要があります。
ホストポート番号を50000以上に設定することを推奨します。
ソリューションを開くとインターフェースサービスを自動的に起動 オプションを選択可能です。チェックを入れると、次回ソリューションを開く時に インターフェースサービスを起動 する必要はありません。
適用 をクリックします。
インターフェースサービスを起動 します。
その後、選択されたロボットに応じてロボット側のプログラムを作成し、プログラムの読み込みを実行します。詳細については、 標準インターフェース開発者向けマニュアル をご参照ください。