ABB 標準インターフェースの通信設定¶
本節では、ABBロボットの標準インターフェースの通信設定について説明します。
ハードウェアとソフトウェアのバージョンを確認¶
四軸または六軸ロボット。
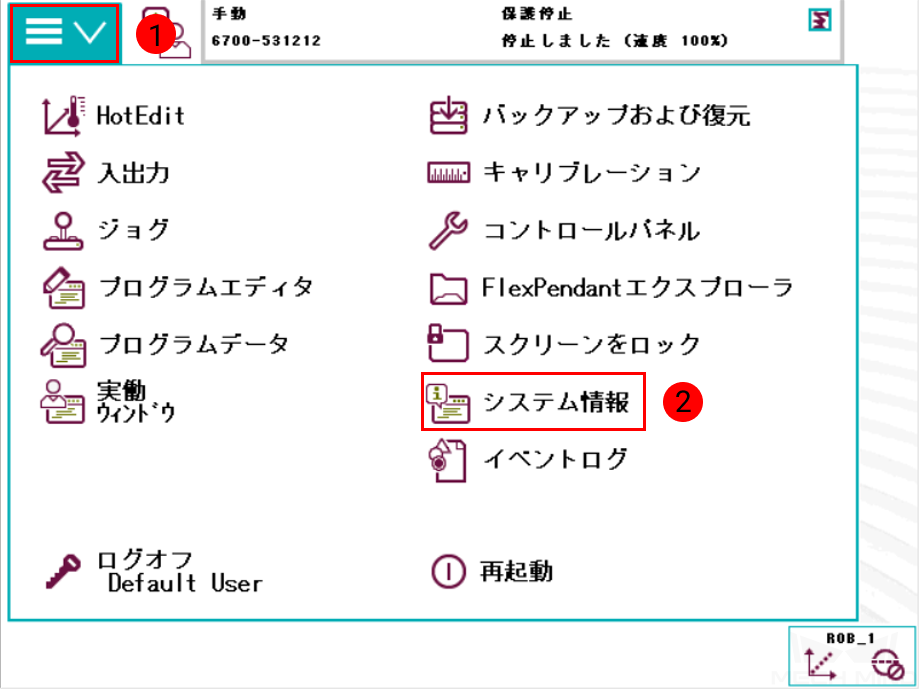
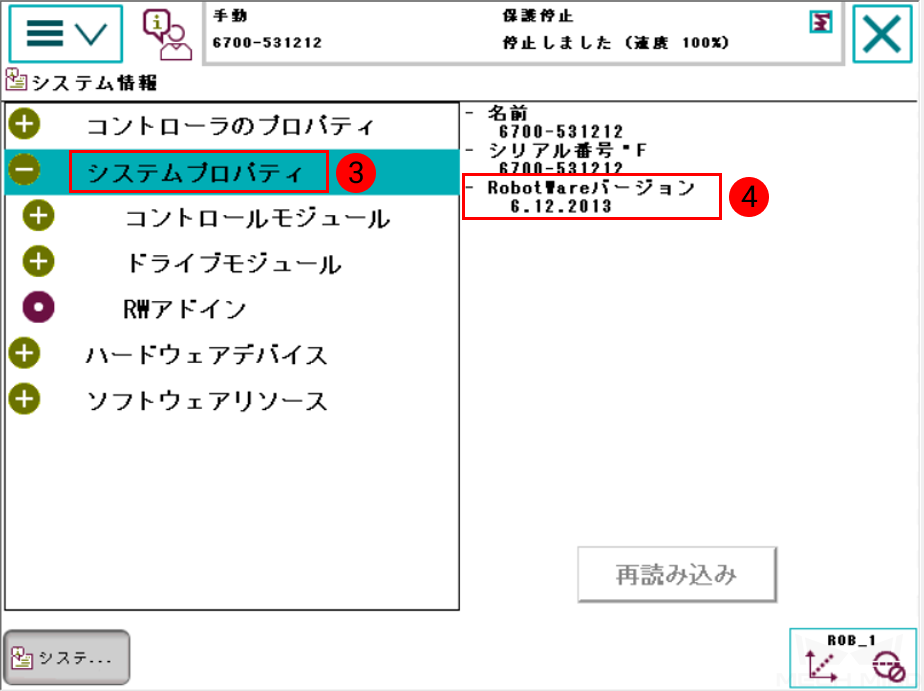
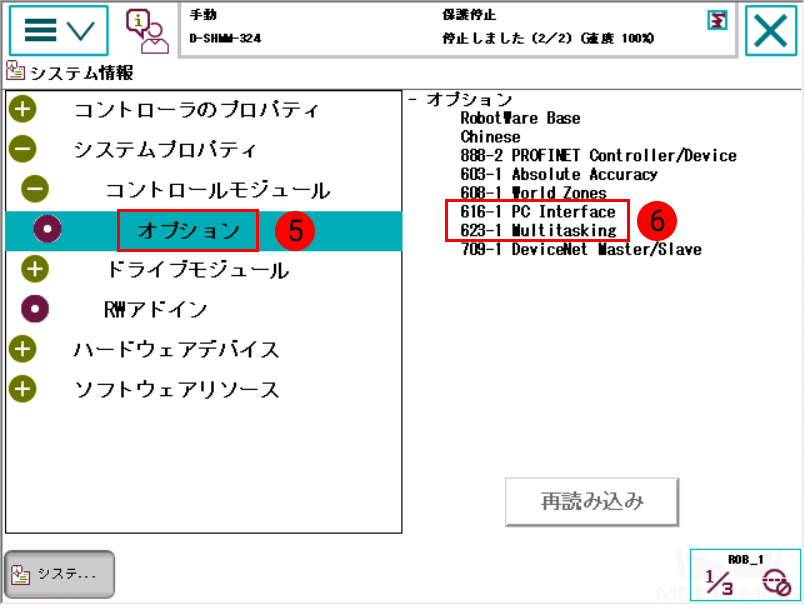
制御モジュールには616-1 PC Interfaceオプションがインストールされています。以下の手順に従って確認してください。
注意
標準インターフェースを使用するには、制御モジュールに616-1 PC Interfaceオプションがインストールされている必要があります。
ネットワーク接続を確立¶
IP設定¶
ティーチペンダントまたはRobotstudioでIPを設定することができます。
ティーチペンダントでIPを設定:
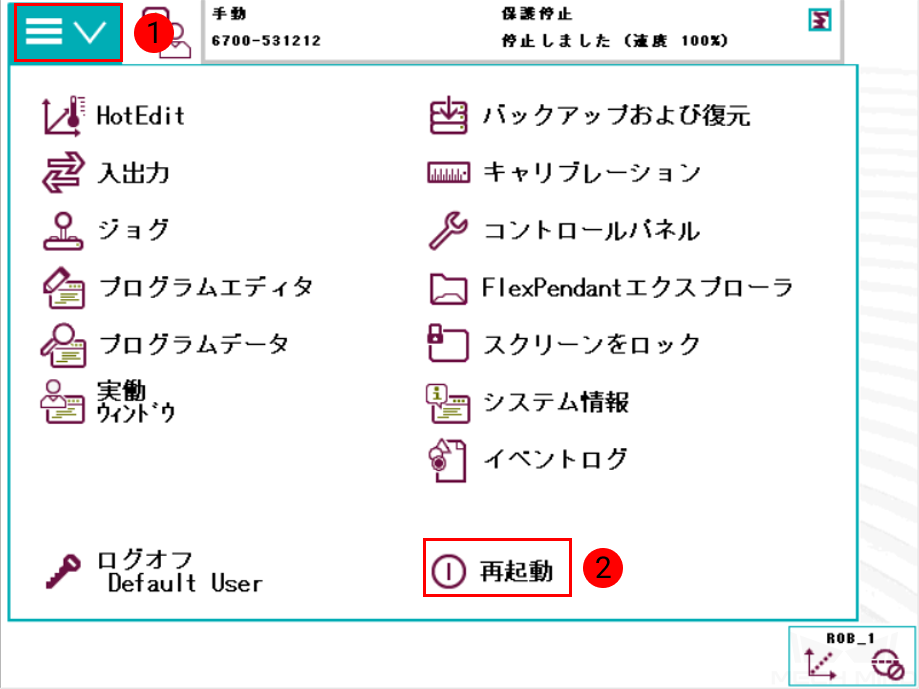
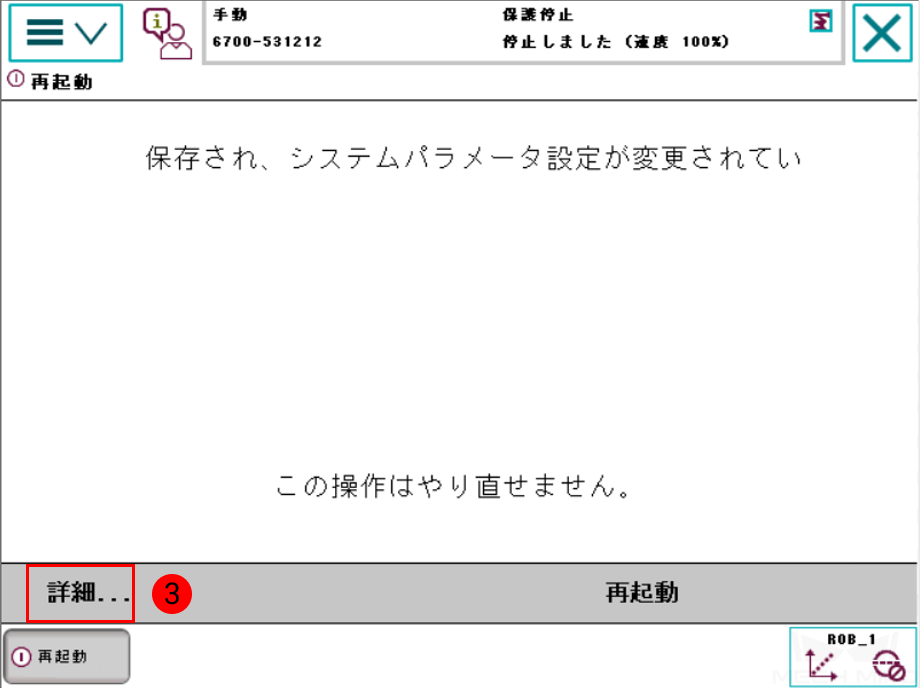
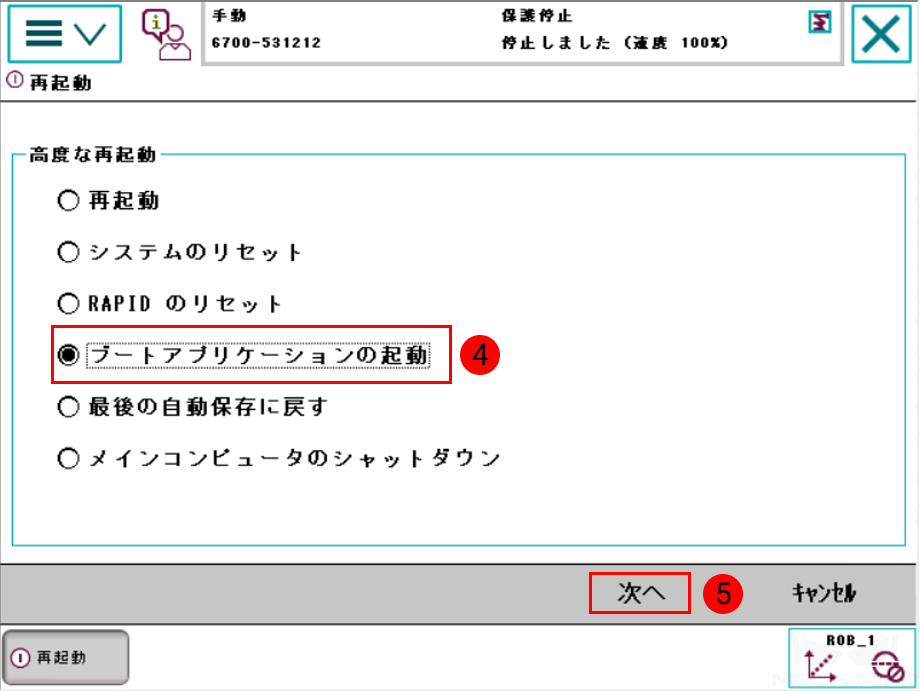
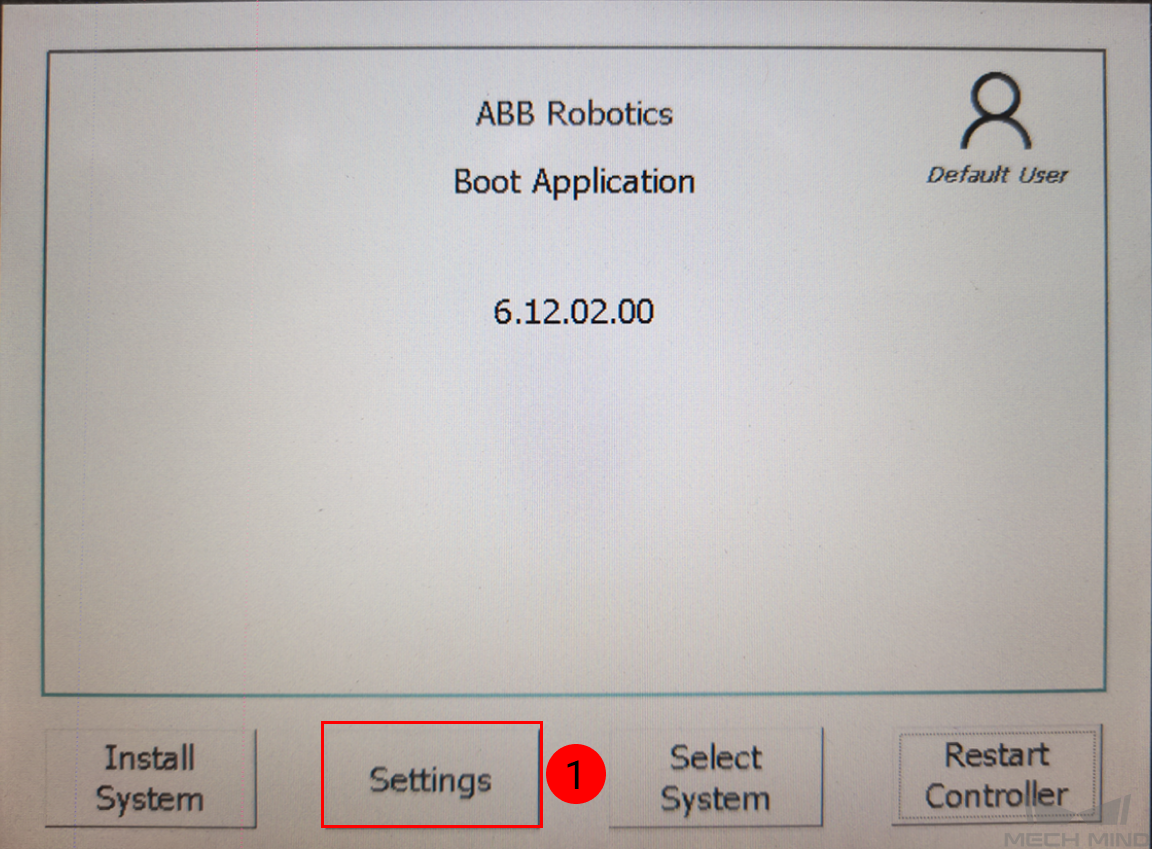
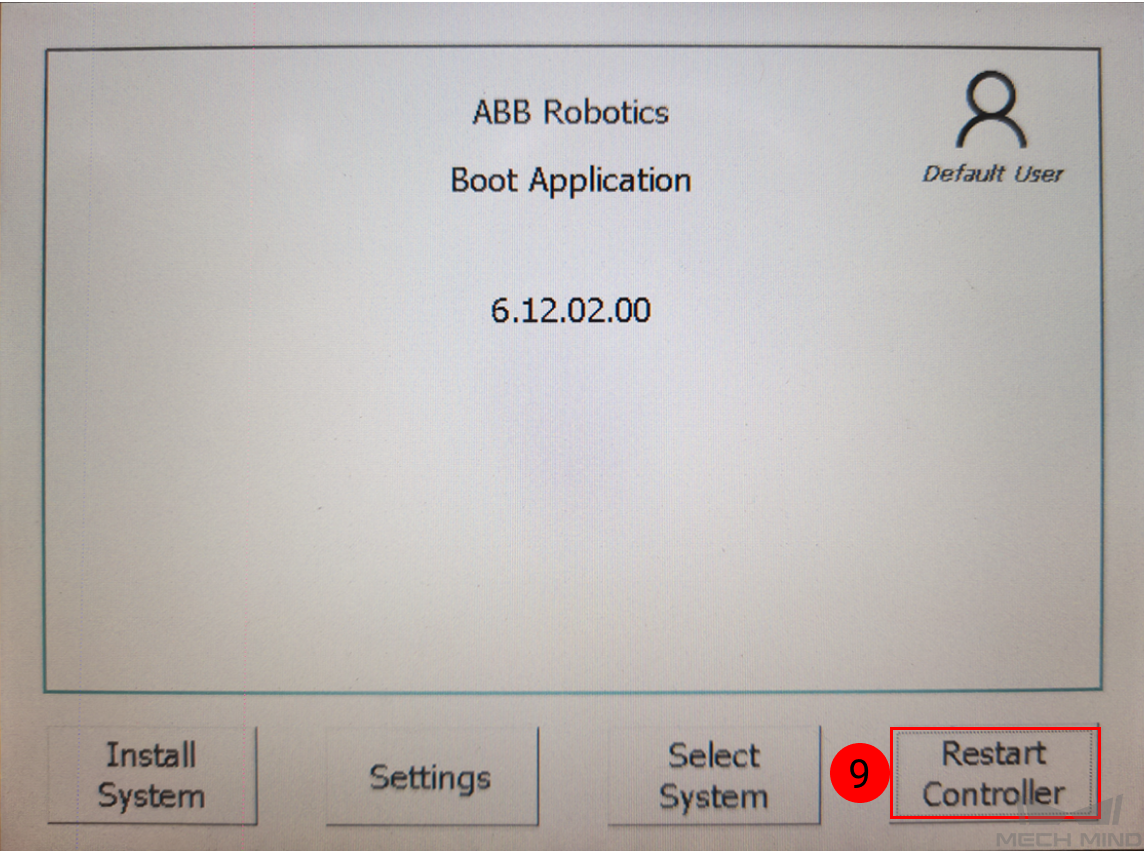
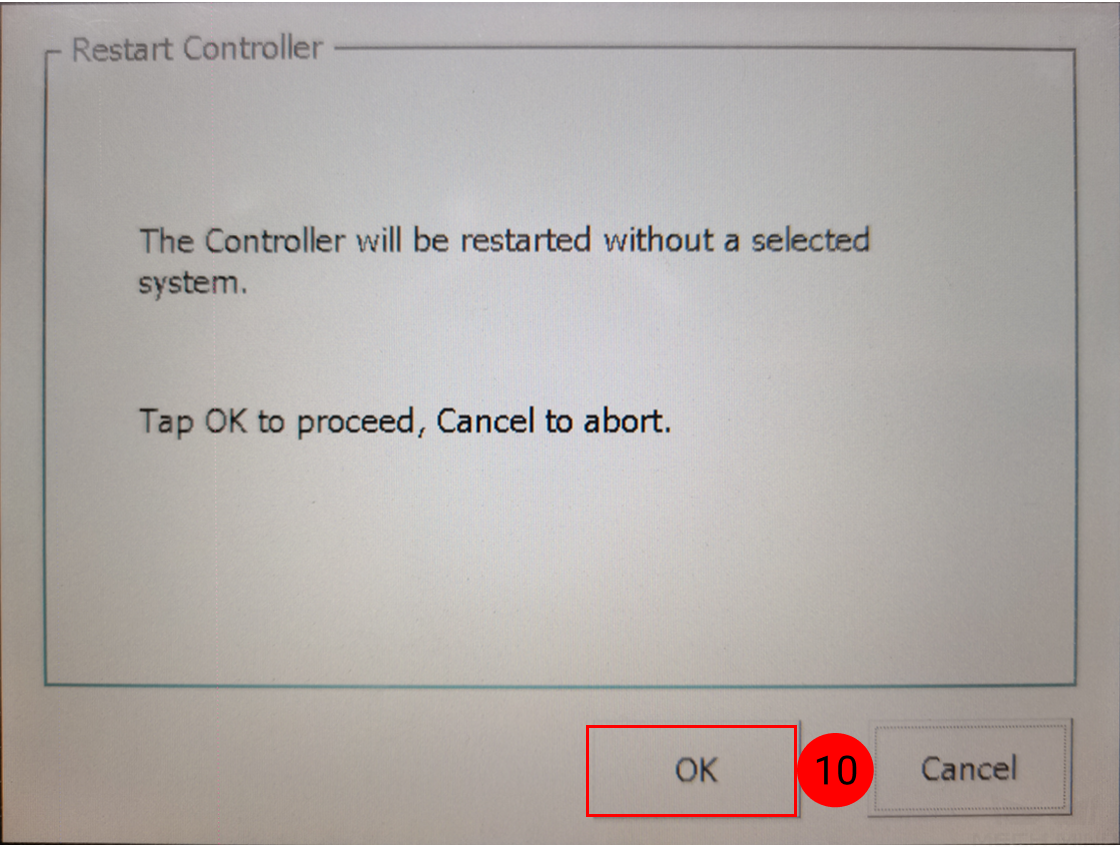
下図の通りにブートアプリケーションを起動します。
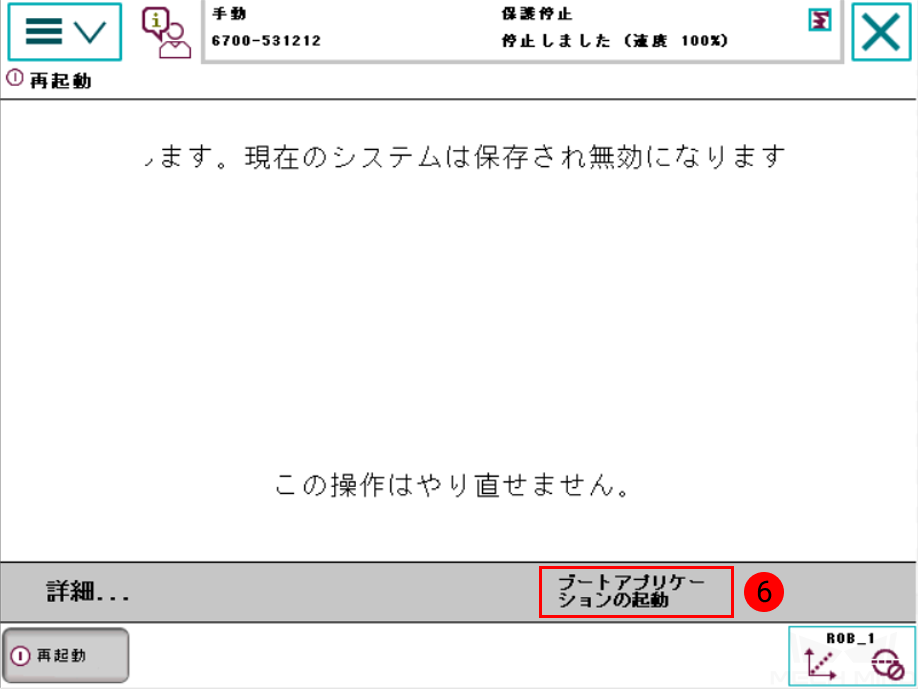
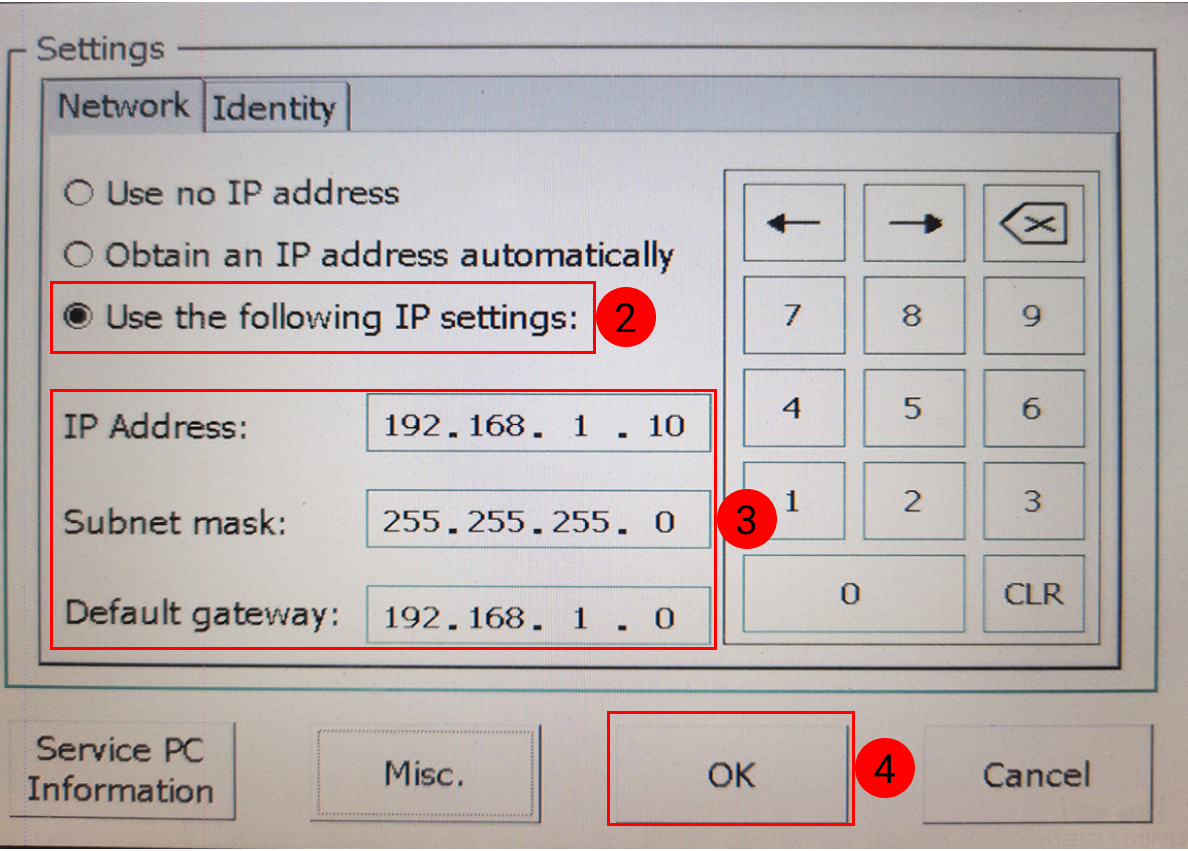
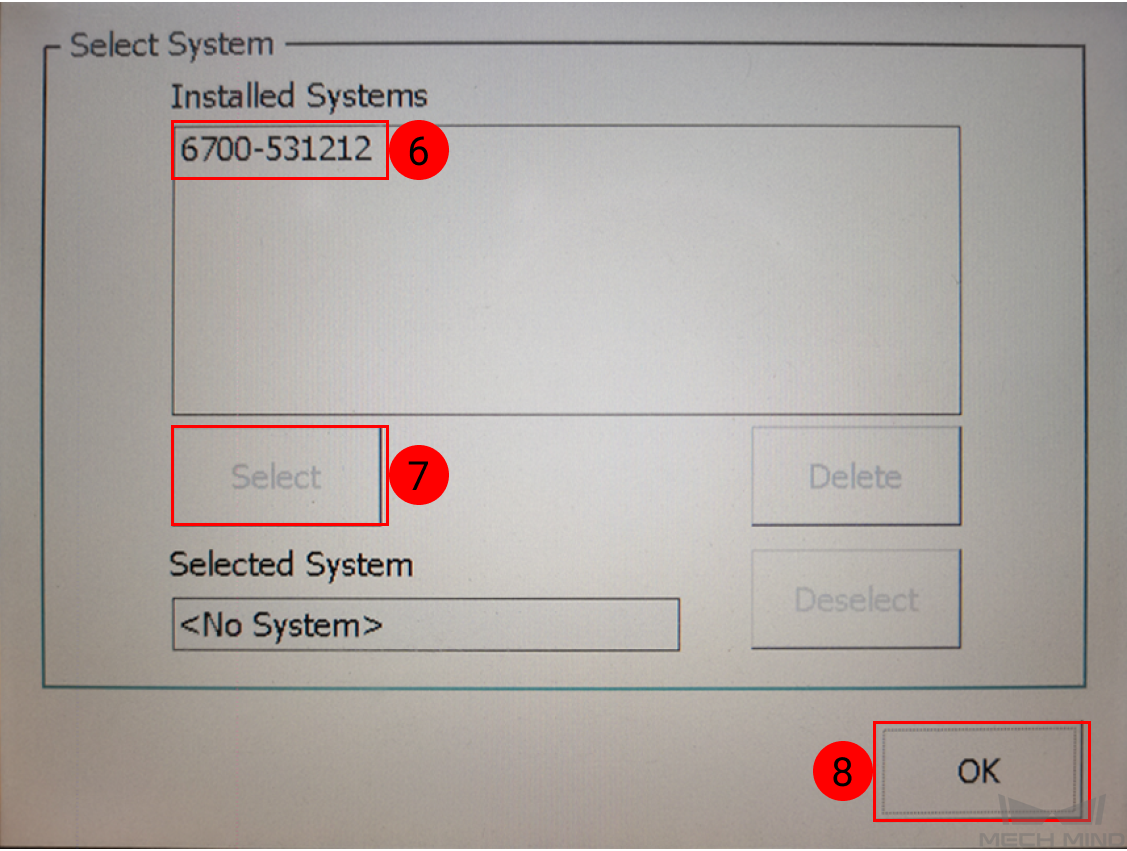
再起動して以下の画面に入り、IP設定を行います。ロボットと産業用コンピュータIPを同じネットワークセグメントに設定してください。

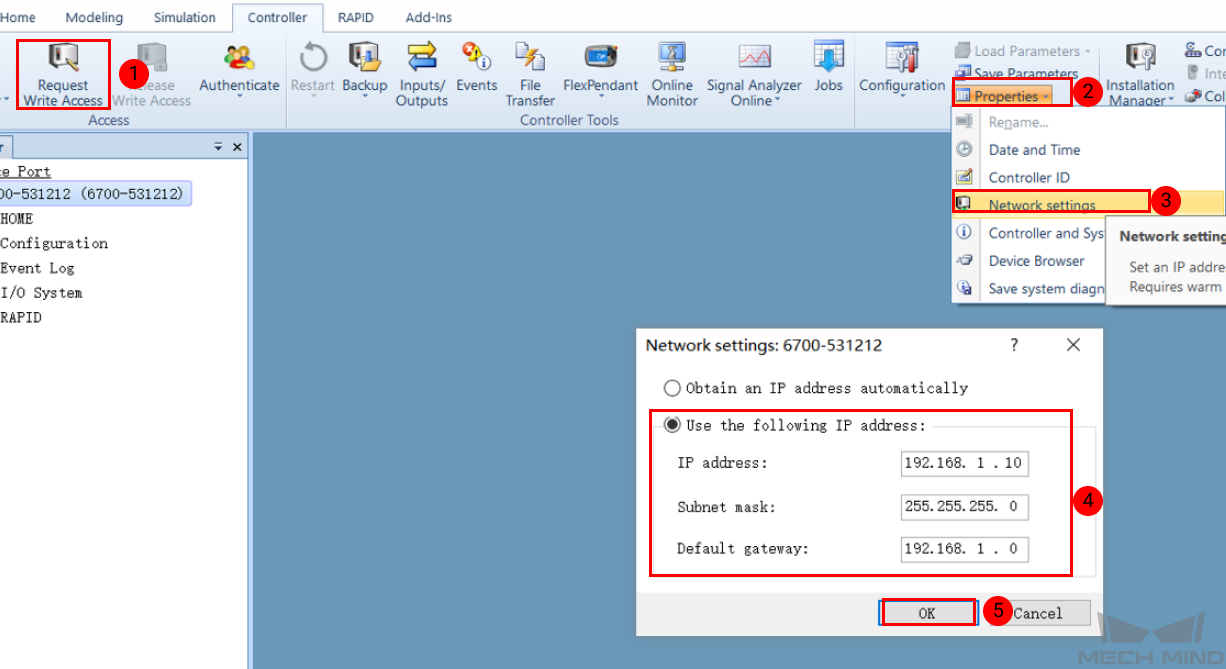
RobotstudioでIPを設定:
下図に示すようにIPを設定します。設定完了後、ロボットを再起動してください。
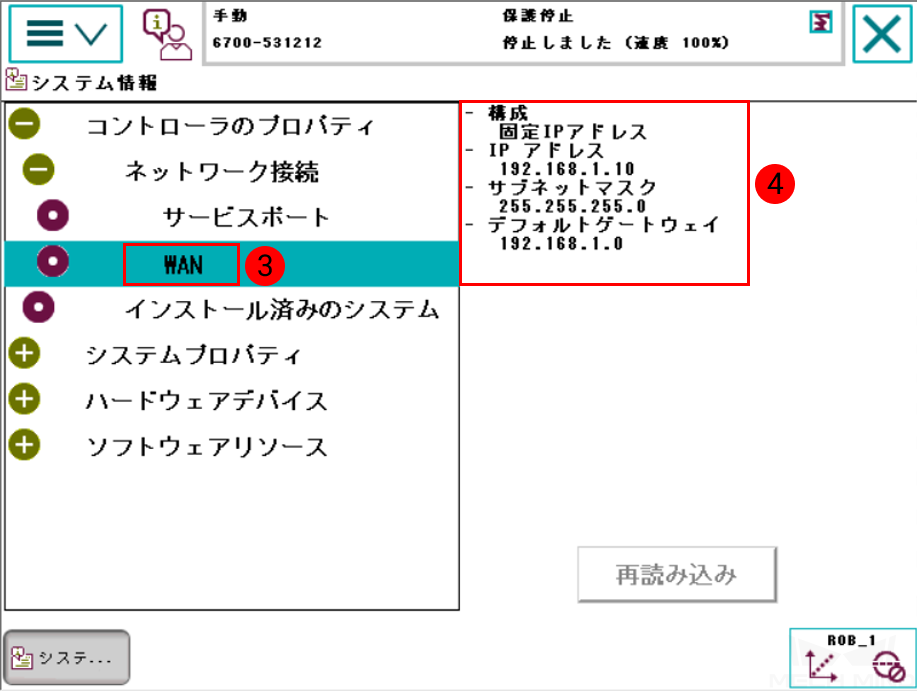
IP変更の結果を確認:

Mech-Visionで「ロボット通信設定」を実行¶
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
ロボットを選択 のドロップダウンボックスをクリックし、 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のABBロボット型番を選択して 次へ をクリックします。
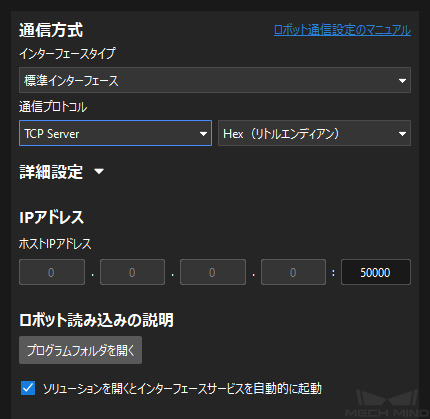
通信方式 の画面で、インターフェースタイプを 標準インターフェース に、通信プロトコルを TCP Server に、プロトコル形式を HEX(リトルエンディアン) に選択してから、 適用 をクリックします。
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。

ファイルをロボットにロード¶
注意事項¶
誤操作後にロボットシステムを復元するために、ロボットを操作する前にバックアップを作成してください。
ティーチペンダントでバックアップを作成
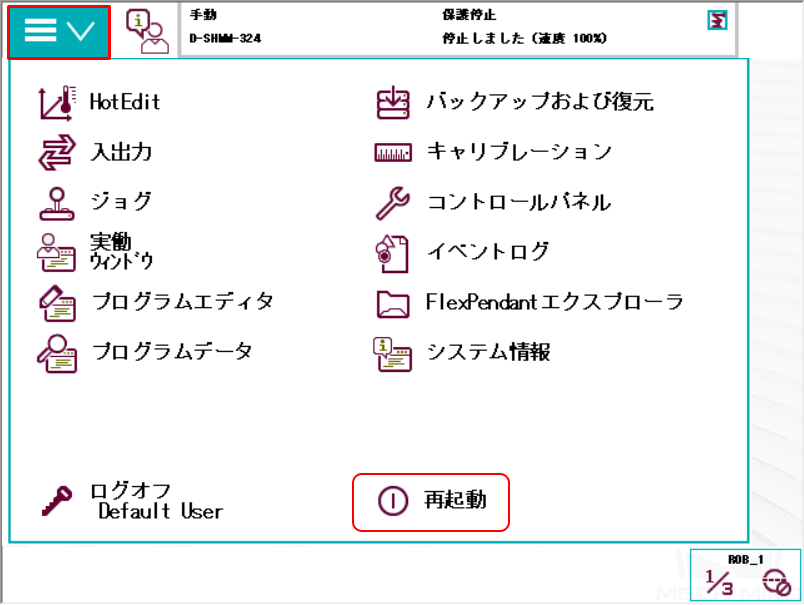
左上のメニューバーをクリックするとメイン画面が表示され、 再起動 をクリックします。
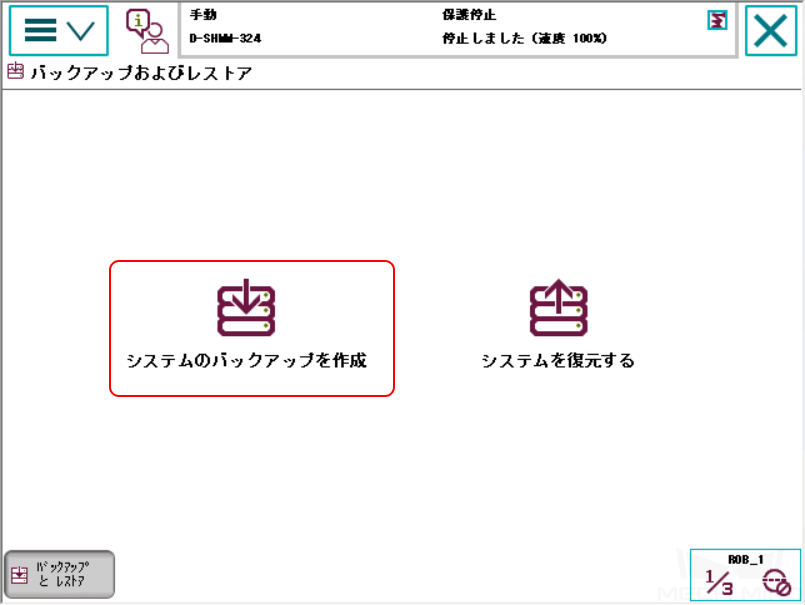
システムのバックアップを作成 をクリックします。
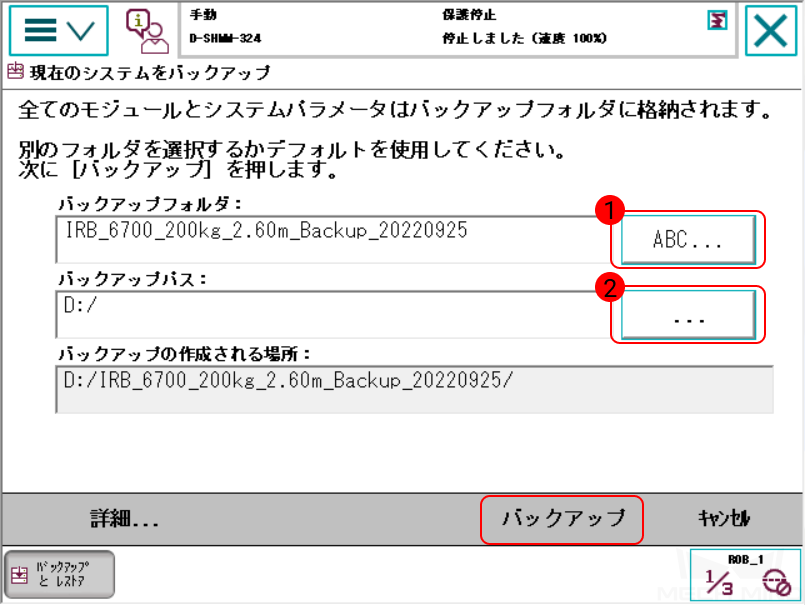
1 をクリックして名前を変更し、 2 をクリックしてパスを変更することができます。変更したら、 バックアップ をクリックします。
読み込むファイルを選択¶
Mech-Mindソフトウェアシステムのインストールディレクトリ Mech-Center\Robot_Interface\ABB には、 ABBロボットの読み込みファイル(次の2つのファイル)をUSBメモリにコピーします。
MM_Module.mod (プログラムモジュールファイル)
MM_Auto_Calib.mod (プログラムモジュールファイル)
選択したファイルをロボットにロード¶
ティーチペンダントまたはRobotStudioを使用してファイルをロボットにロードします。
ティーチペンダントでロード:
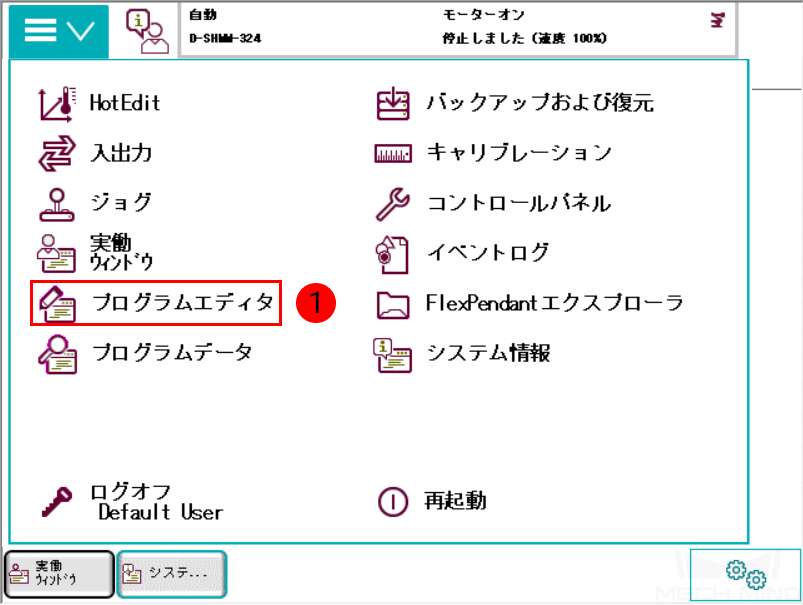
プログラムエディタ をクリックします。
タスクおよびプログラム をクリックします。
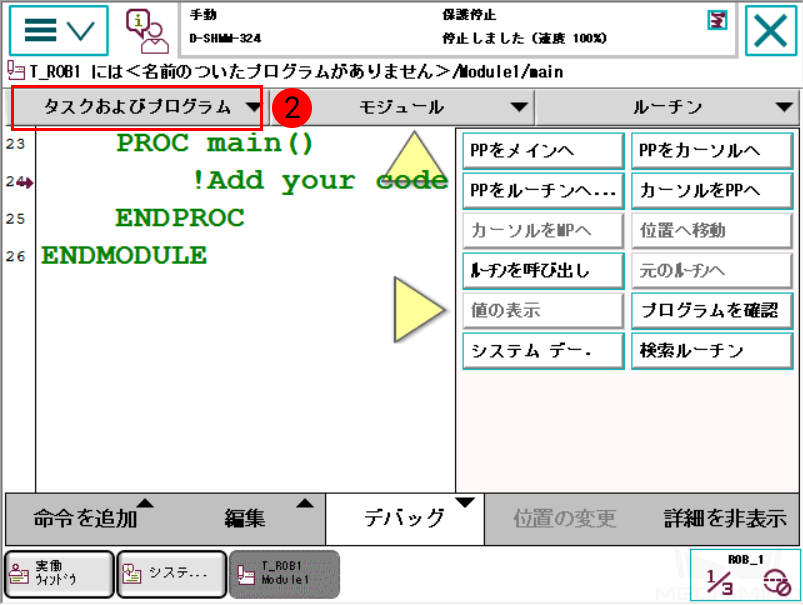
T_ROB1 を選択して モジュールの表示 をクリックします。

をクリックします。

USBメモリにあるプログラムモジュールファイル MM_Module.mod を選択して OK をクリックします。
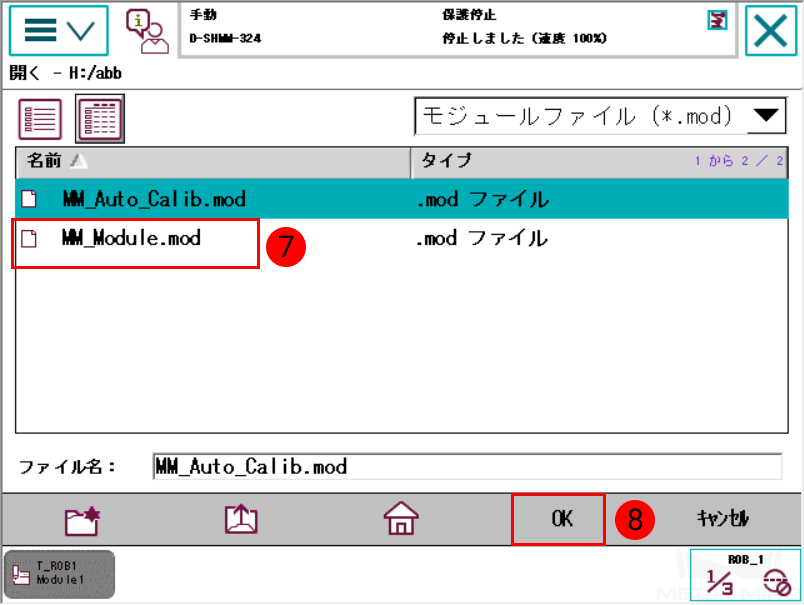
ポップアップウィンドウで はい をクリックします。

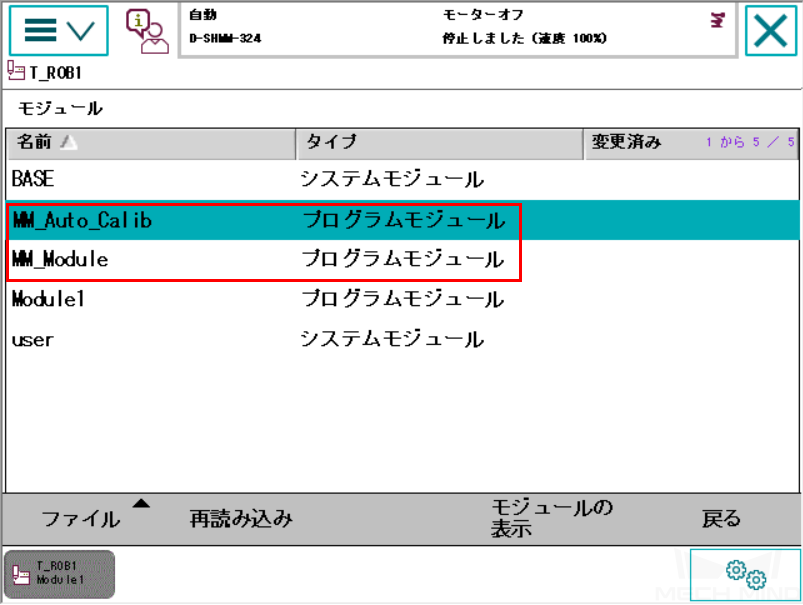
上記を参照して MM_Auto_Calib.mod をロードします。最後にT_ROB1で2つのファイルがロードされたかを確認します。
RobotStudioでロード:
RobotStudioを起動してコントローラに接続します。
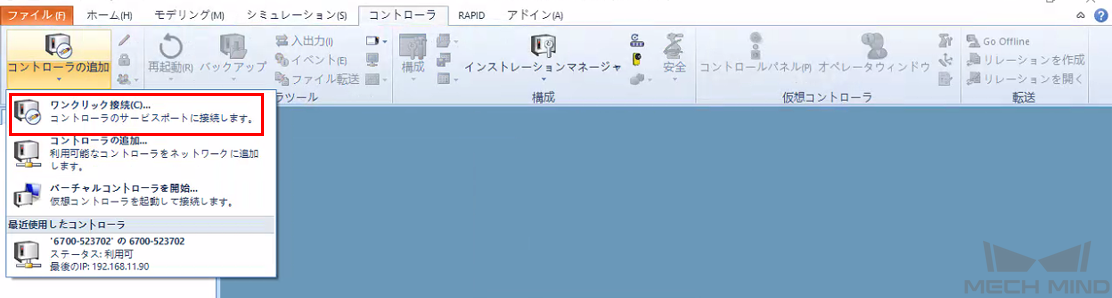
産業用コンピュータのLANケーブルがコントローラのLANポートに接続された場合、 ワンクリック接続 をクリックします。
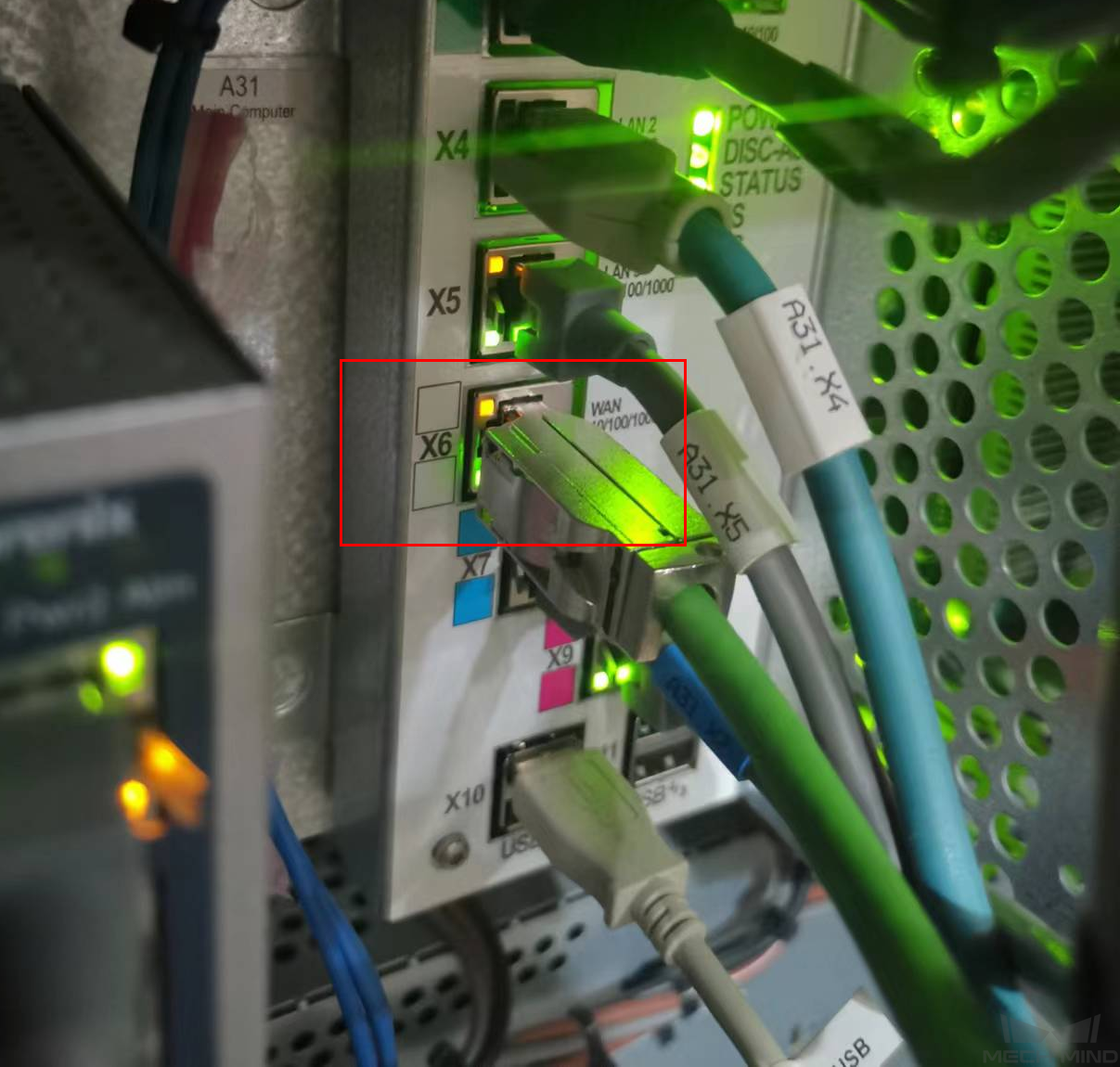
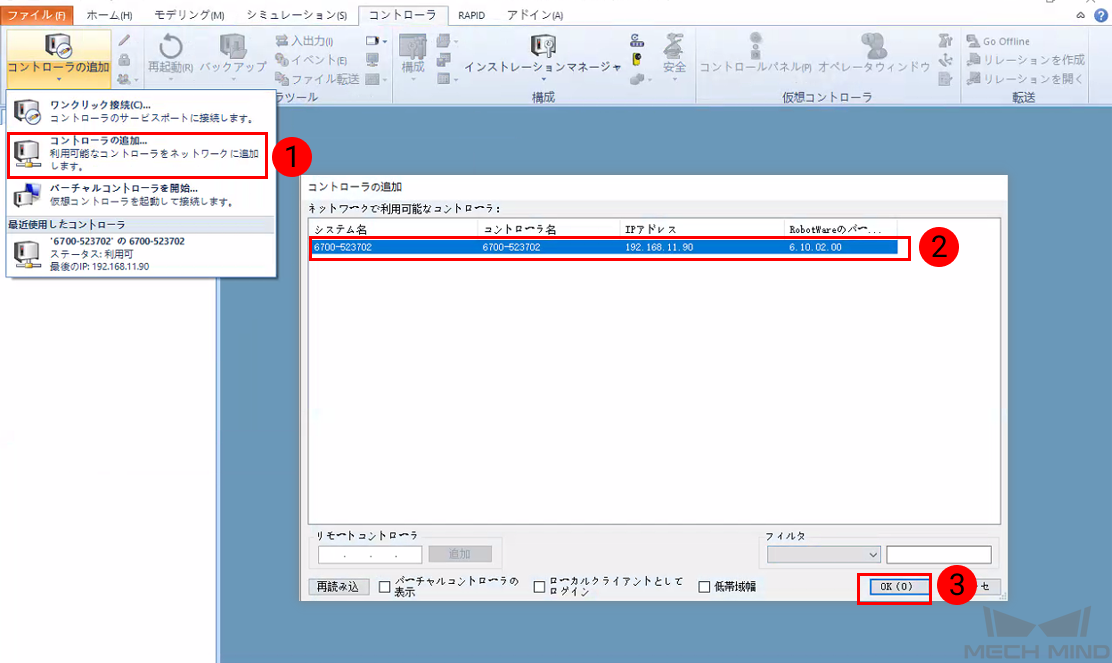
スイッチを介して、または直接コントローラX6ネットワークポート(WANポート)に接続された場合、下図に示すようにコントローラを追加します。それで自動的にコントローラに接続されます。
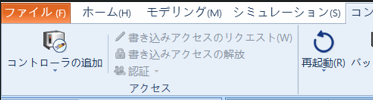
書き込みアクセスをリクエストします。
書き込みアクセルのリクエスト をクリックし、ティーチペンダント側から書き込みアクセルをリクエストします。
ティーチペンダントの 書き込みアクセルのリクエスト 画面で 同意 をクリックします。
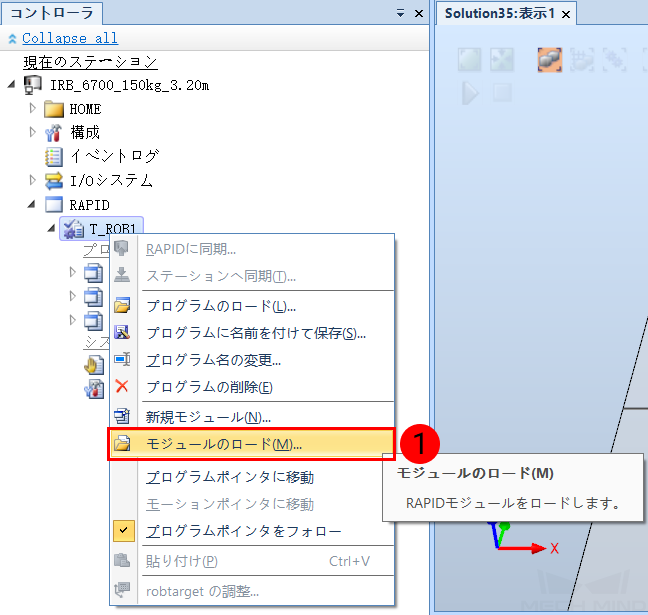
下図に示すように、T_ROB1を右クリックしてから モジュールのロード をクリックします。
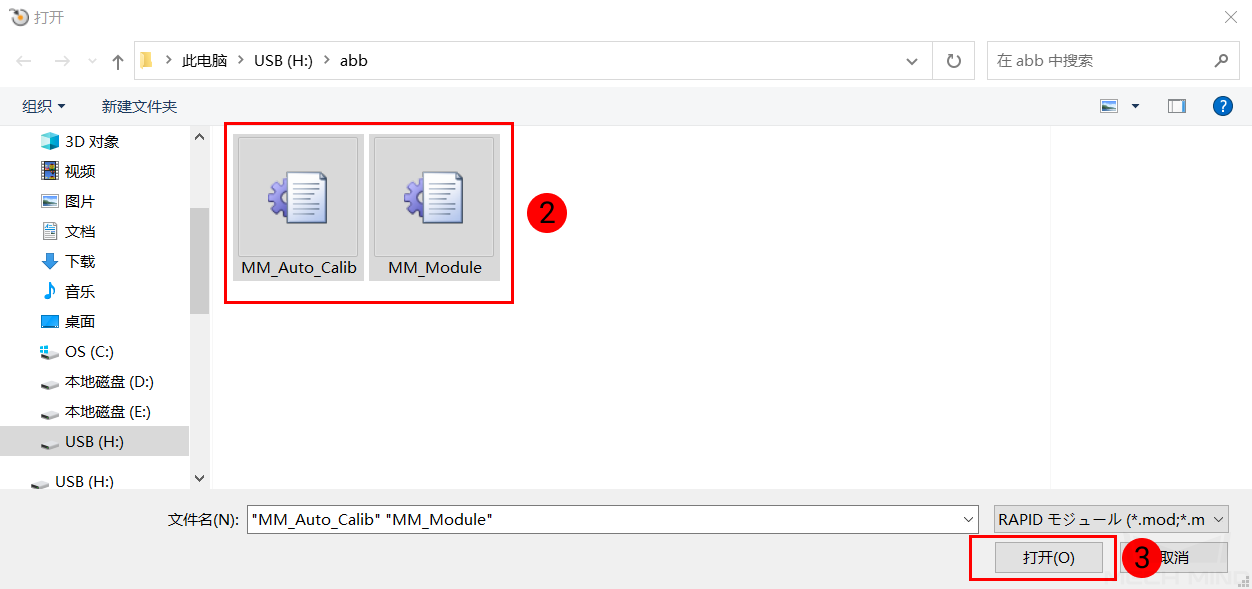
ファイルを選択して 開く をクリックします。
T_ROB1で二つのファイルがロードされたかを確認します。

ロード後の操作¶
MM_Auto_Calibを選択して モジュールの表示 をクリックします。

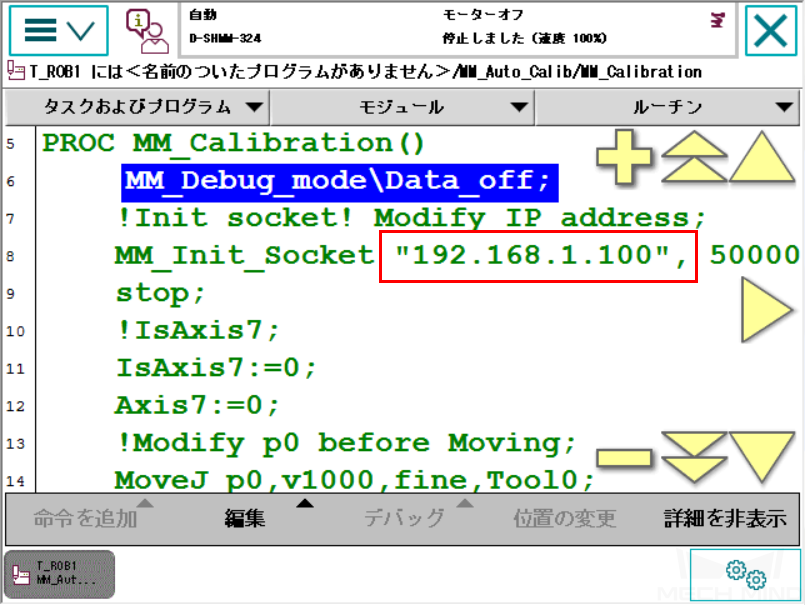
MM_Calibrationを開きます。

プログラムのIPアドレスを産業用コンピュータのIPアドレスに変更します。Mech-VisionでホストIPアドレスが変更されたら、50000というポート番号もそれと一致するように変更しなければなりません。
ロボットの接続状態をテスト¶
接続をテスト¶
ティーチペンダントで をクリックします。
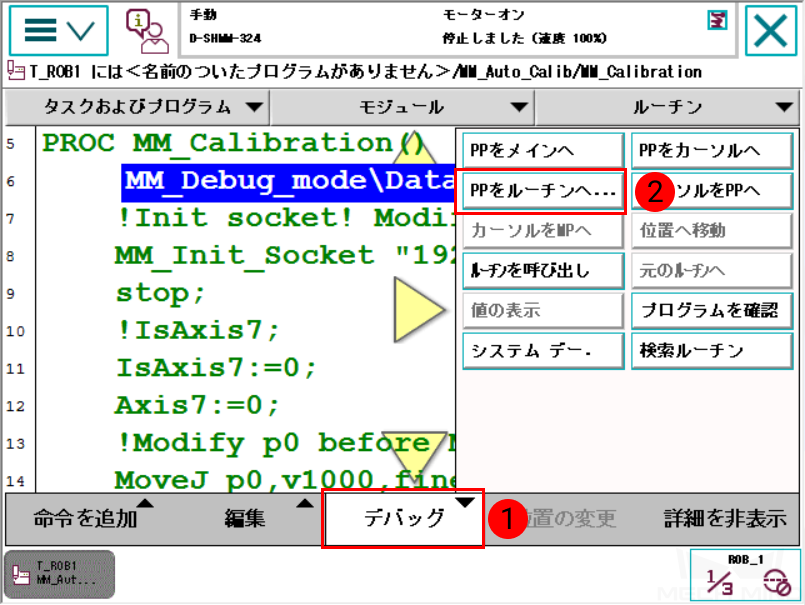
MM_Calibrationを選択して OK をクリックします。

指針が9行目に移すまで手動でプログラムを実行します。
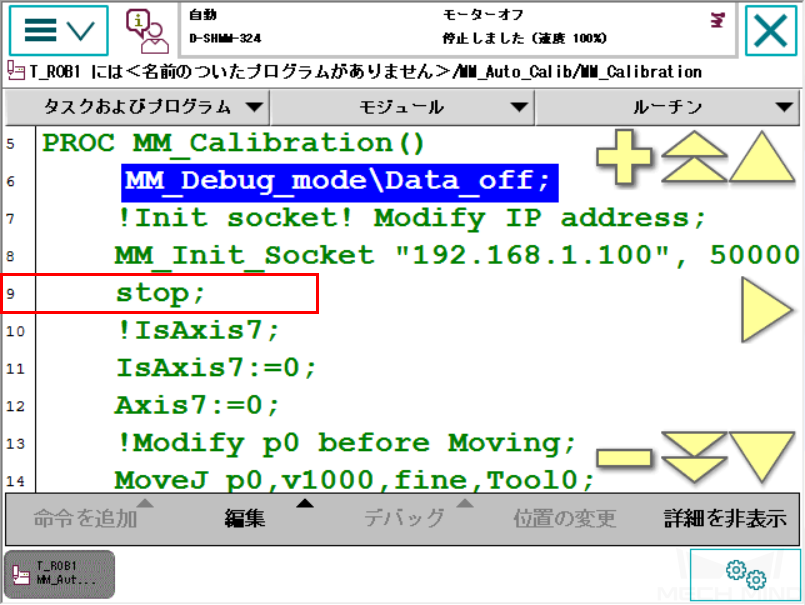
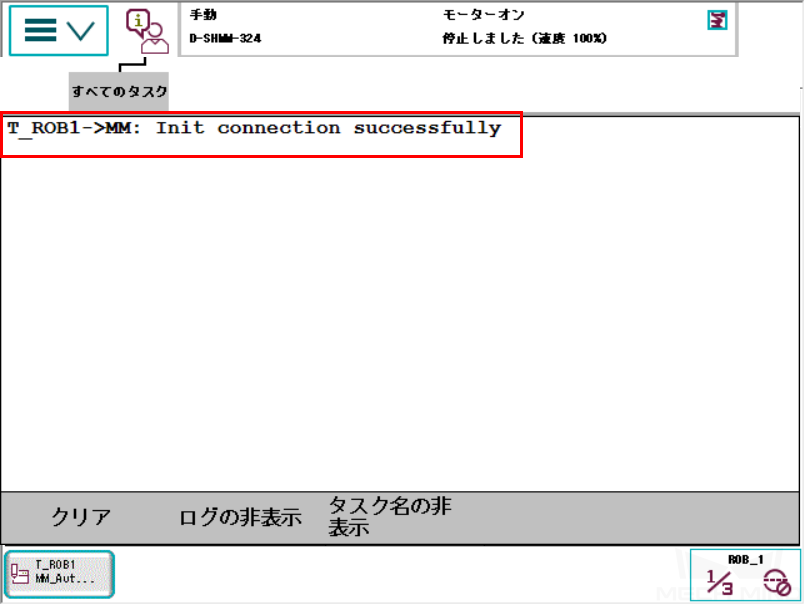
ティーチペンダントで以下のようなメッセージが表示されると、正常に接続されたことになります。