Kawasaki 標準インターフェースの通信設定¶
本節では、Kawasakiロボットの標準インターフェースの通信設定について説明します。
コントローラーとソフトウェアバージョンを確認¶
コントローラ:EシリーズおよびFシリーズ。
ソフトウェアバージョン:特別な要件はありません。
ソフトウェアオプション:特別な要件はありません。
ネットワーク接続を確立¶
ハードウェアの接続¶
LANケーブルでコントローラのLANポートと産業用コンピュータのLANポートを接続します。
コントローラのCPUボードに2つのLANポートがあり、それらのIPを別々に設定する必要があります。

IP設定¶
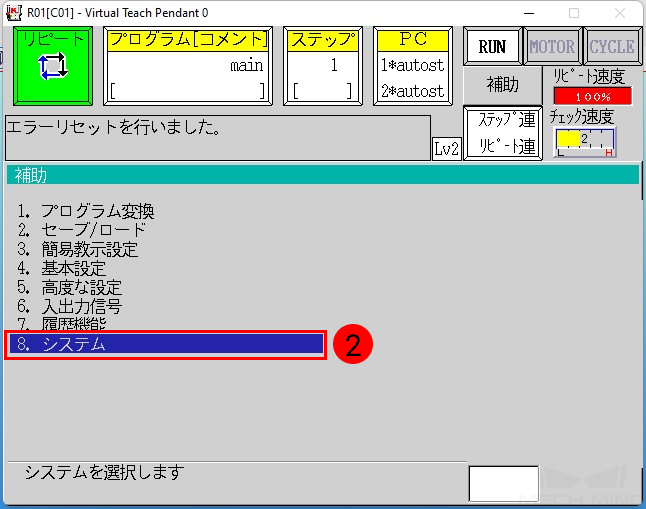
ロボットLANポートのIPを設定するには、まず、ティーチペンダントの 補助 をクリックします。そして をクリックします。


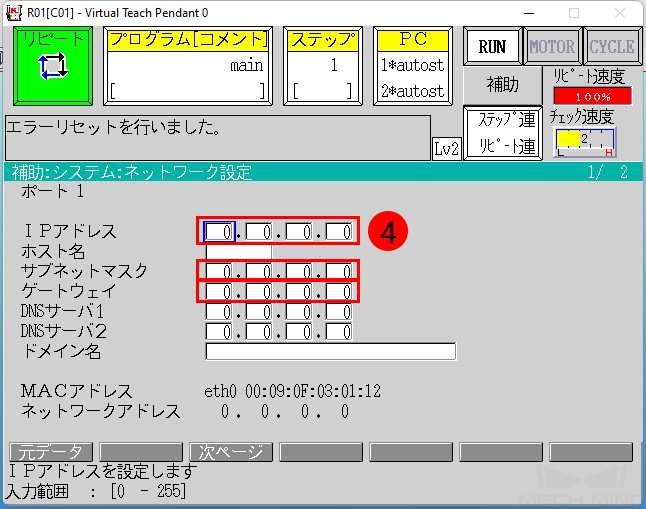
ポート1画面でロボットのネットワークポート1のIPとサブネットマスクを設定します(ロボットIPと産業用コンピュータIPを同じネットワークセグメントに設定する必要があります)。ゲートウェイを使用すれば、ゲートウェイIPの設定も必要があります。
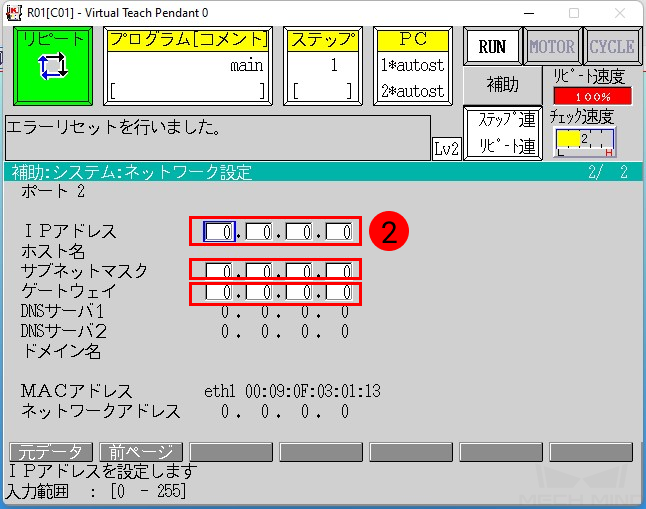
ロボットがポート2に接続する場合、ポート1の設定画面の下にある 次ページ をクリックし、ポート2の画面に設定を行います。

IPアドレスを設定した後、ティーチペンダントの 登録 をクリックして、コントローラの電源を入れ直します。
Mech-Visionで「ロボット通信設定」を実行¶
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
ロボットを選択 のドロップダウンボックスをクリックし、 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のKawasakiロボット型番を選択して 次へ をクリックします。
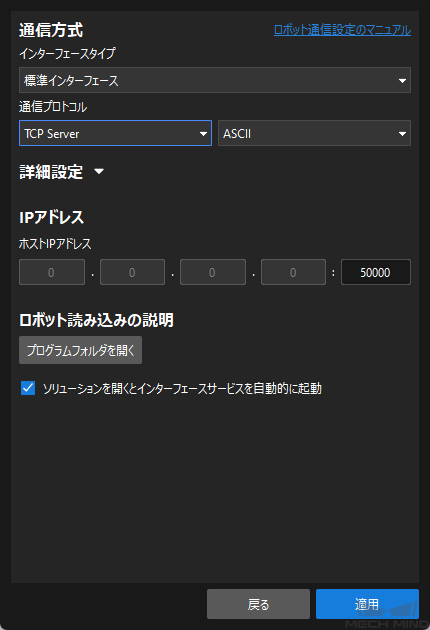
通信方式 の画面で、インターフェースタイプを 標準インターフェース に、通信プロトコルを TCP Server に、プロトコル形式を ASCII に選択してから、 適用 をクリックします。
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。

ファイルをロボットにロード¶
ロードするファイルを選択する¶
Mech-Mindソフトウェアシステムのインストールディレクトリ Mech-Center\Robot_Interface\KAWASAKI には、 mm_module.as ファイルをUSBメモリにコピーします。

事前準備¶
ユーザーのプログラムを保存
ヒント
ティーチペンダントにユーザーのプログラムがある場合、ロードを実行する前にそれをバックアップしてください。
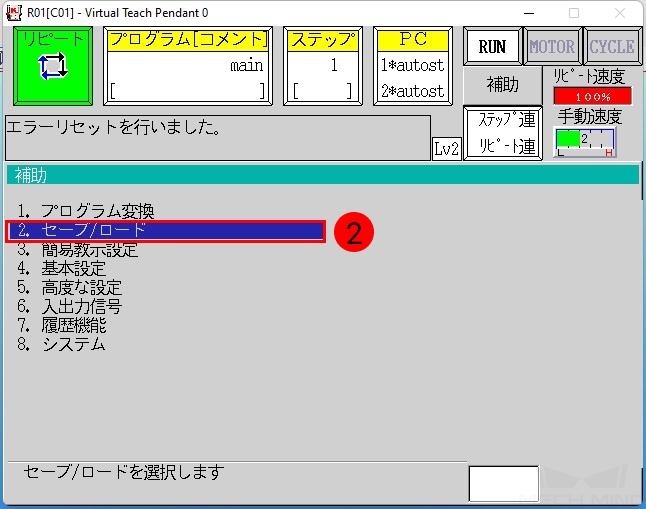
補助 をクリックして、 をクリックします。

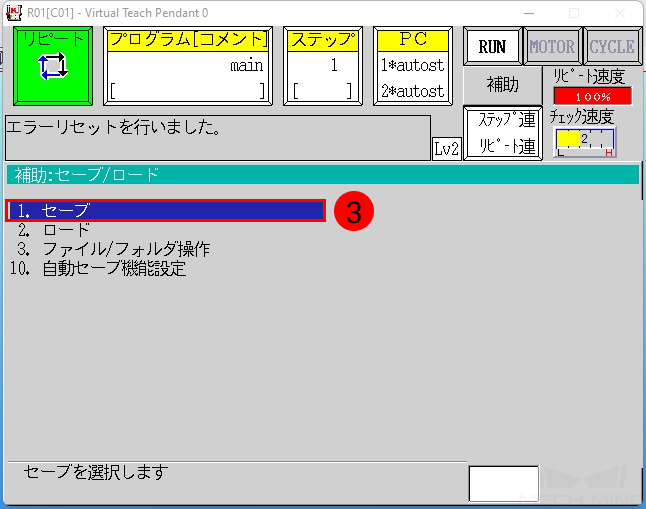
保存画面でファイル名をクリックします。それで ファイル名入力 をクリックして入力してから セーブ をクリックします。保存したらティーチペンダントの R をクリックしてメインインターフェイスに戻ります。

ロードする前に、ティーチペンダントのプログラムウインドウに登録されているプログラムがないことを確認してください。登録されているプログラムがあれば、下図に従ってそれを登録解除してください。

また、ロードする前、ロボットがティーチモードになっている必要があります。確認したら、ティーチペンダントの画面は下図のように示します。

ロードを実行¶
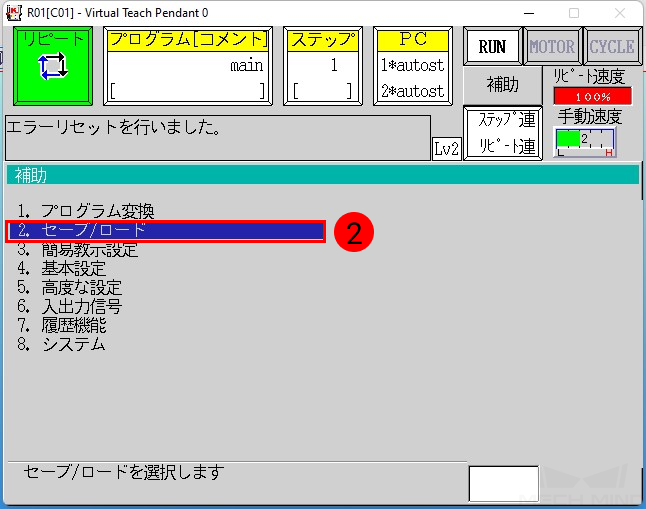
ティーチペンダントで 補助 をクリックして、 をクリックします。プログラムファイル mm_module.as をダブルクリックして mm_module.as をファイル名に表示します。そして ロード をクリックします。



ファイルをロードして確認した後、ティーチペンダント R をクリックして終了します。

ロボットの接続状態をテスト¶
ロボット通信をテストするためのプログラムを選択して変更¶
注意
vision_sample_1 プログラムを実行する前に、次の条件を満たす必要があります。
Mech-Visionで 現在のソリューションを自動的に読み込む または 現在のプロジェクトを自動的に読み込む にチェックが入っていることを確認してください。
Mech-Visionソフトウェアのプロジェクトリストで、現在のプロジェクト番号を1に調整します。
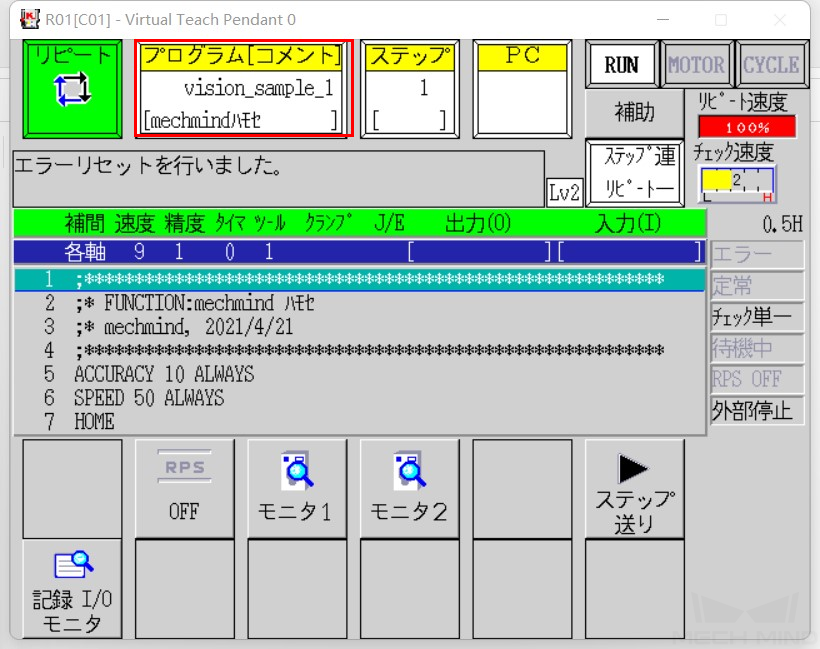
ティーチペンダントのフォアグラウンドプログラム vision_sample_1 を選択し、プログラムウィンドウをクリックして、リストからプログラム vision_sample_1 を選択し、ティーチペンダントの 登録 を押します。

フォアグラウンドプログラムが追加された後、下図のように示します。
vision_sample_1 プログラムの10行目を変更し、「127, 0, 0, 1」を実際の産業用コンピュータのIPアドレスに変更します。また、「50000」をMech-Visionに設定されたホストアドレスに変更します。
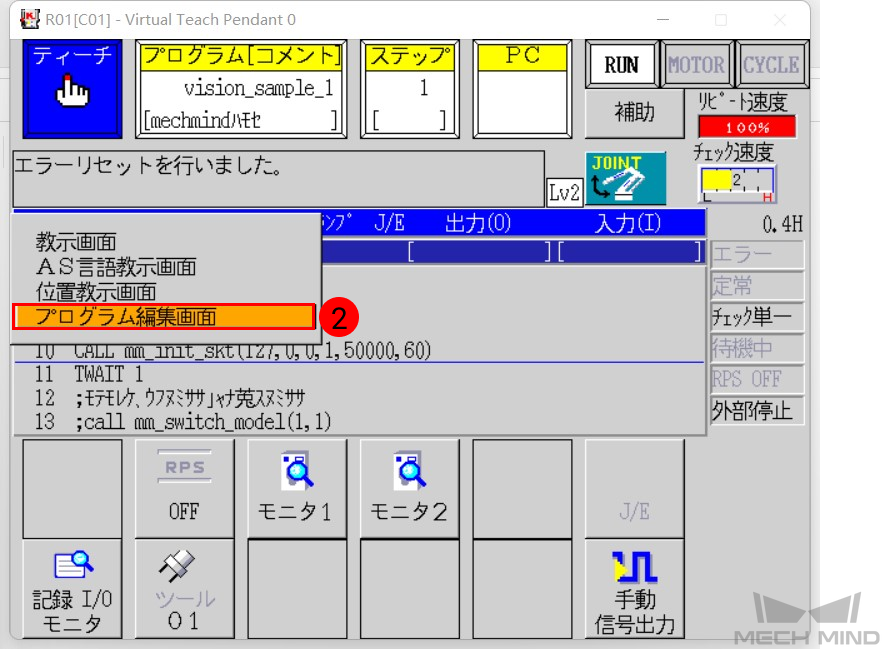
ティーチペンダントの J/E を押し、ポップアップメニューで プログラム編集画面 を選択し、 登録 を押します。

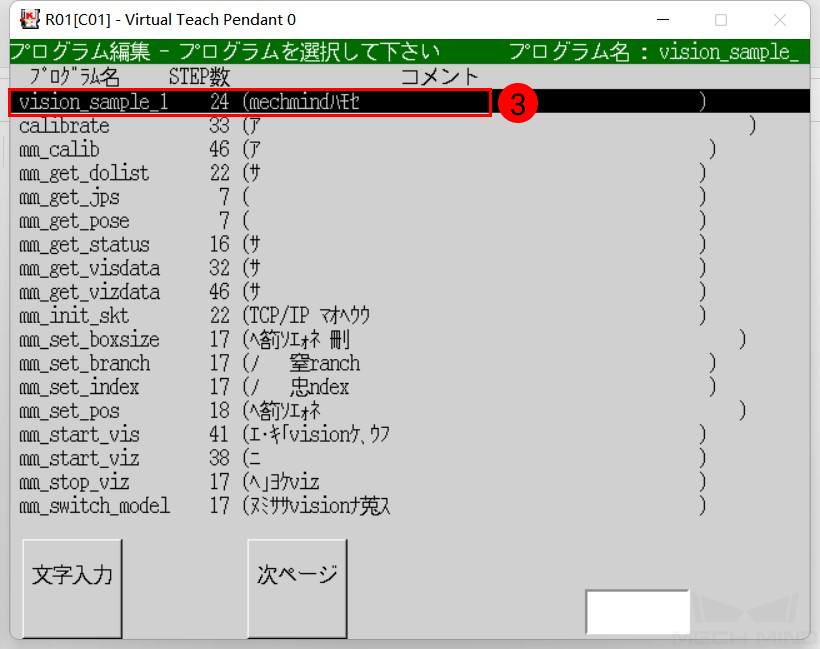
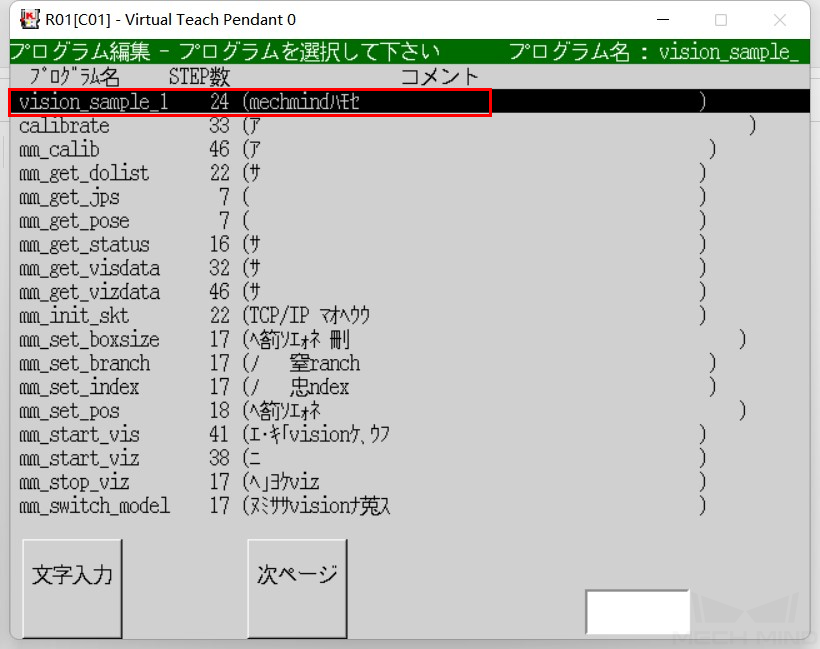
プログラムリストで vision_sample_1 を選択し、 登録 を押します。
ティーチペンダントの方向キーを使用して赤い枠を10行目の右側に移動し、 登録 を押します。

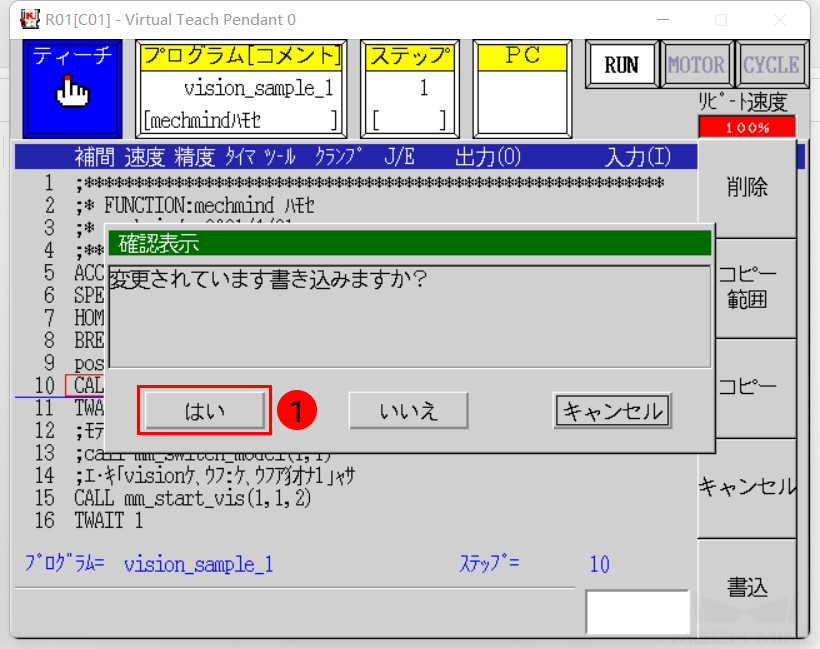
ティーチペンダントの方向キーを使用して、入力ボックスのカーソルを対応する位置に移動し、「127,0,0,1」を産業用コンピュータのIPアドレスに変更します。また、「50000」をMech-Centerの 画面に設定されたホストアドレスに変更します。変更後、 登録 を押して、 R を押して終了します。

ポップアップウィンドウで、 はい を選択し、次に 閉じる を選択します。
テストプロジェクトを実行¶
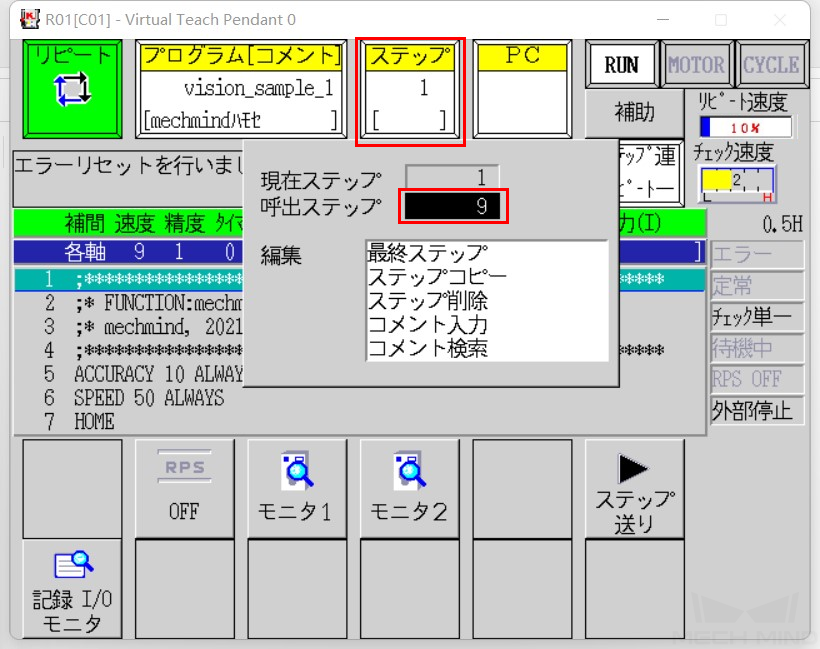
コントローラを リピートモード に切り替え、速度を 10 % に調整します。そして、 リピートモード を ステップ連続、リピート一回 に調整します。

ステップ1から実行すれば、ロボットは初期位置に戻ります。テスト中にロボットを初期位置に戻さないで、それを現在の位置にそのまま保持したい場合は、ステップ1をステップ9に変更することで通信接続のみをテストすることができます。その後、 登録 をクリックすると、7行目の命令をスキップできます。

ティーチペンダントの A を押しながら、 MOTOR をクリックして、 MOTOR を点灯させます。ティーチペンダントの A を押しながら、 CYCLE をクリックして、CYCLE を点灯させます。 RUNが点灯していない場合は、A -> 一時停止/実行を順番に押します。

接続に成功すると、Mech-Visionのログの「Console」タブに関連するメッセージが表示されます。