YASKAWA 標準インターフェースの通信設定¶
本節では、YASKAWAロボットの標準インターフェースの通信設定について説明します。
ハードウェアとソフトウェアバージョンを確認¶
六軸YASKAWAロボットを使用していることを確認します。
コントローラのバージョンはYRC1000またはYRC1000microであるかを確認します。
YASKAWAロボットのMotoPlusおよびイーサネット機能を有効にする必要があります。
ネットワーク接続を確立¶
ハードウェアの接続¶
YRC1000シリーズのコントローラを使用する場合、産業用コンピュータLANケーブルのもう一方の端をコントローラのCPU基板のLAN2(CN106)ネットワークポートに接続します。
注釈
YRC1000シリーズのコントローラについては以下の点にご注意ください。
LAN1ネットワークポートはティーチングペンダントの接続に使用されますので、産業用コンピュータのLANケーブルには接続できません。
LAN2ネットワークポートが占有されている場合は、産業用コンピュータのLANケーブルをLAN3ポートに接続できます。
IP設定¶
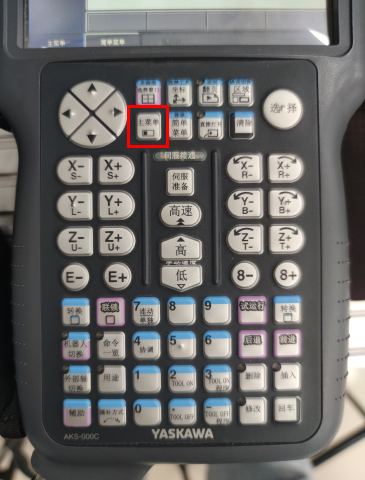
Main Menu キーを押したままにしてロボットの電源を入れ、メンテナンスモードを開始します。
注意
ロボットの電源を入れた時に Main Menu キーを押さないと、通常モードになります。
ロボットがすでに起動している場合は、 Main Menu キーを押しながらロボットを再起動します。
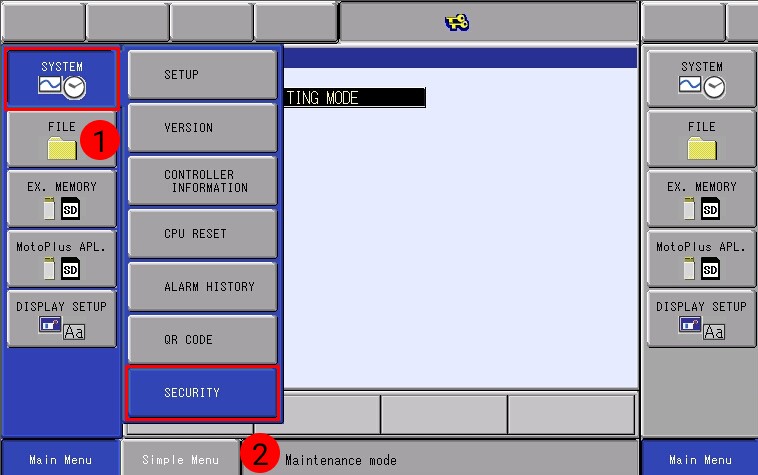
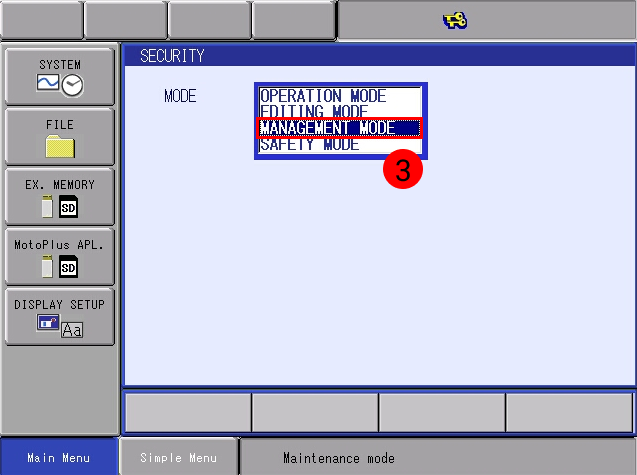
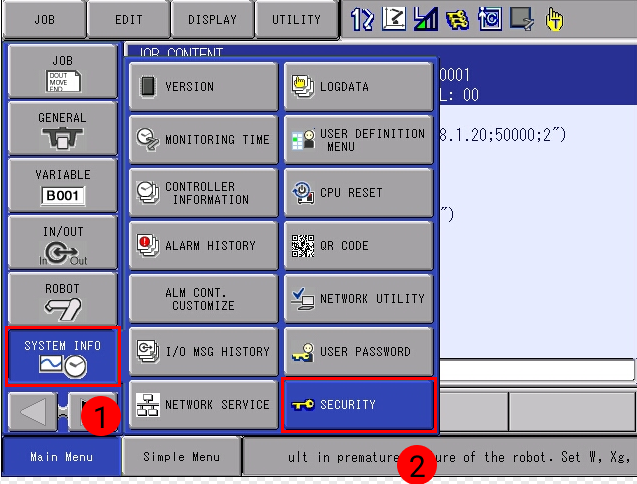
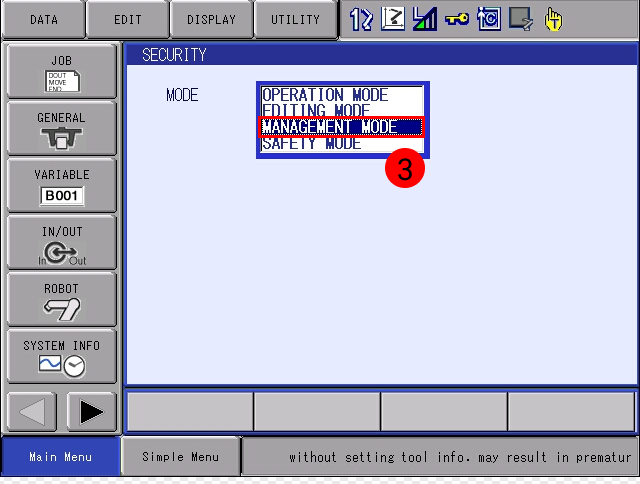
をクリックし、 MANAGEMENT MODE を選択します。

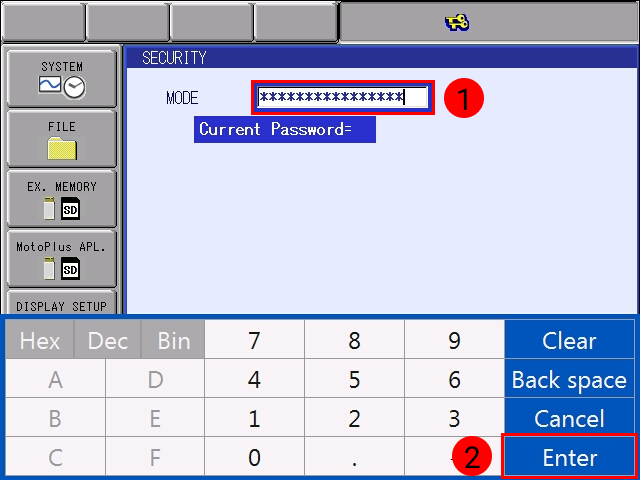
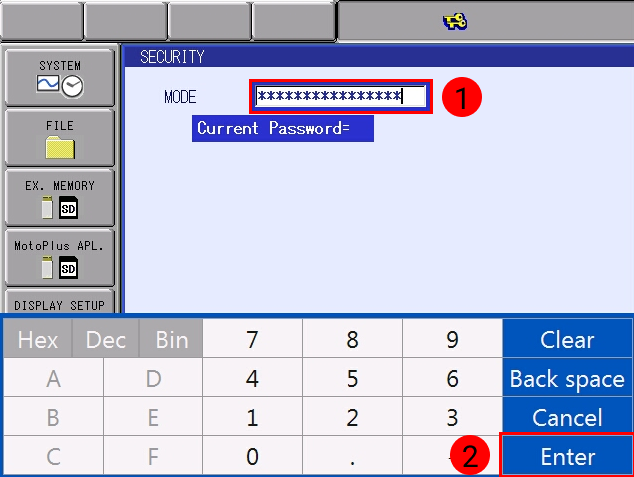
パスワードを入力し、 Enter をクリックして MANAGEMENT MODE になります。デフォルトのパスワードは16の「9」です。
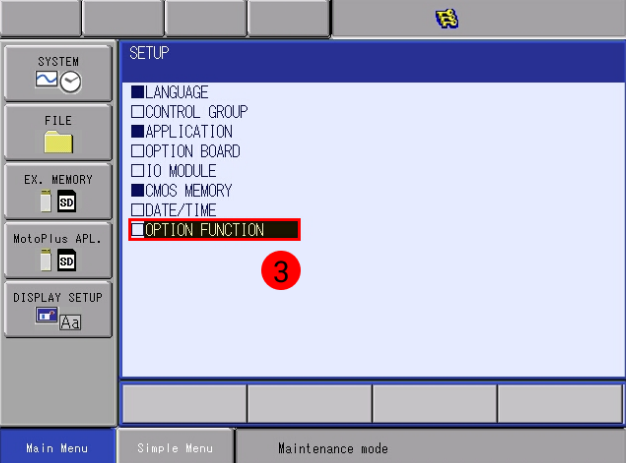
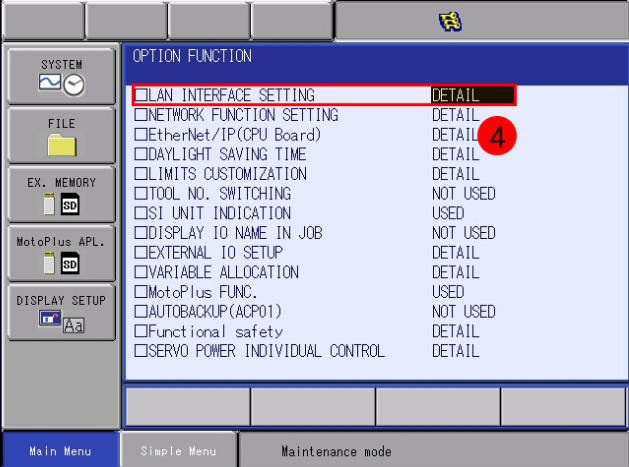
をクリックし、オプション機能の画面に入ります。次に、 LAN INTERFACE SETTING を選択してLANインターフェースの設定画面に入ります。

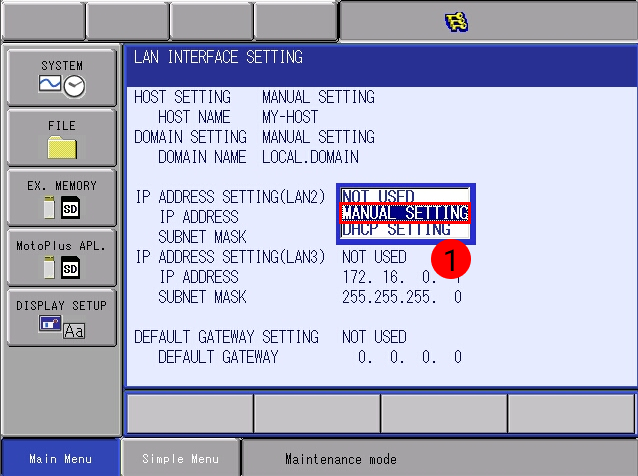
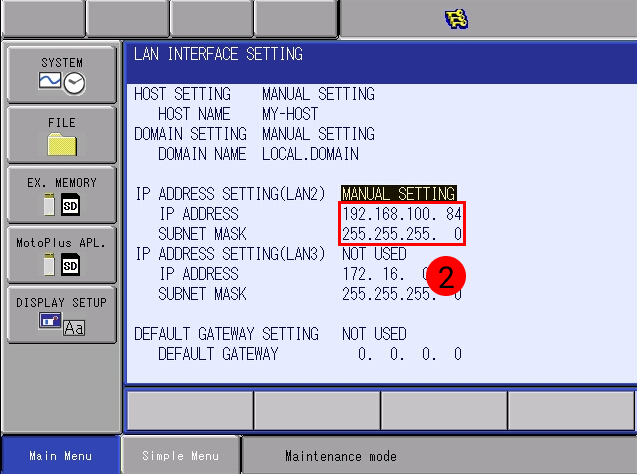
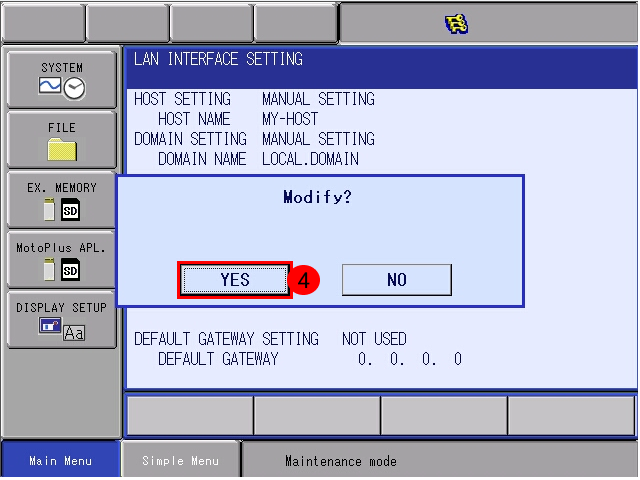
LAN2のIPアドレスはLAN2ポートで設定する必要があります。ドロップダウンメニューで MANUAL SETTING を選択し、 IPアドレス と サブネットマスク(サブネットマスク) を正しく設定してください。
注意
LAN2ポートのIPアドレスと産業用コンピュータのIPアドレスは、同じネットワークセグメントにある必要があります。
サブネットマスクを「255.255.255.0」に設定します。
IPアドレスを変更した後、ティーチペンダントの右下隅にある ENTER キーを押し、ポップアップウィンドウで Yes を選択します。
Mech-Visionで「ロボット通信設定」を実行¶
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
ロボットを選択 のドロップダウンボックスをクリックし、 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のYASKAWAロボット型番を選択して 次へ をクリックします。
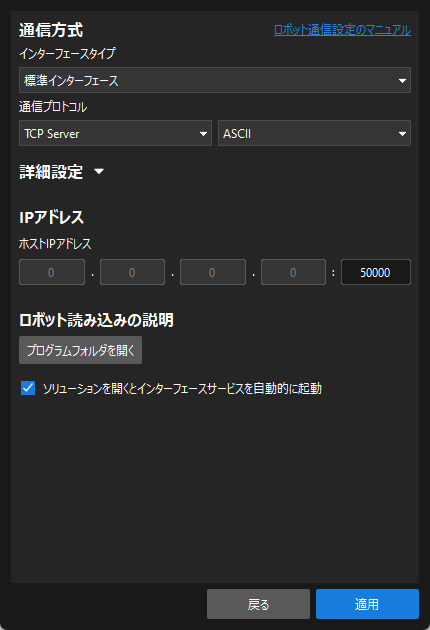
通信方式 の画面で、インターフェースタイプを 標準インターフェース に、通信プロトコルを TCP Server に、プロトコル形式を ASCII に選択してから、 適用 をクリックします。
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。

ファイルをロボットにロード¶
注意
ロボットプログラムをロードする前に、フォアグラウンドプログラムをバックアップする必要がある場合、YASKAWAロボットの「取扱説明書-全般」の第7章をご参照ください。
ロードするファイルを選択¶
YRC1000ロボットを使用して説明します。Mech-Mindソフトウェアシステムのインストールディレクトリ Mech-Center\Robot_Interface\YASKAWA には、 JBI フォルダと mm_module_yrc1000.out ファイルをUSBメモリのルートにコピーします。JBIフォルダはフォアグラウンドプログラムのフォルダ、mm_module_yrc1000.outファイルはバックグラウンドプログラムとなります。
バックグラウンドプログラムファイルをロボットにロード¶
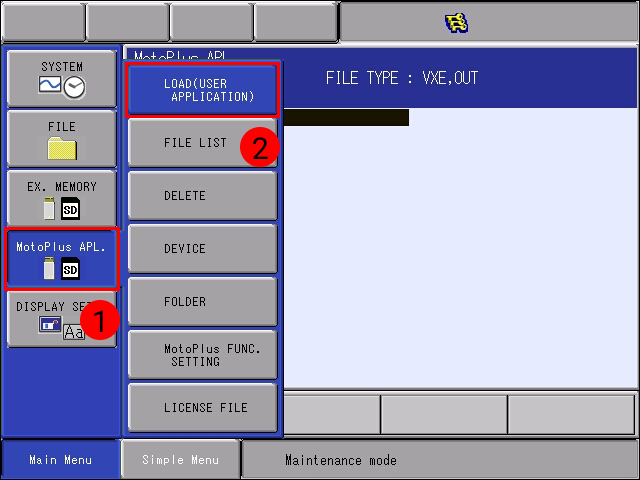
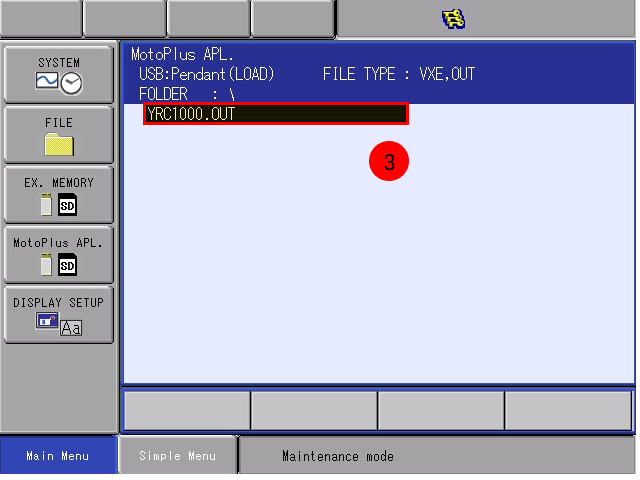
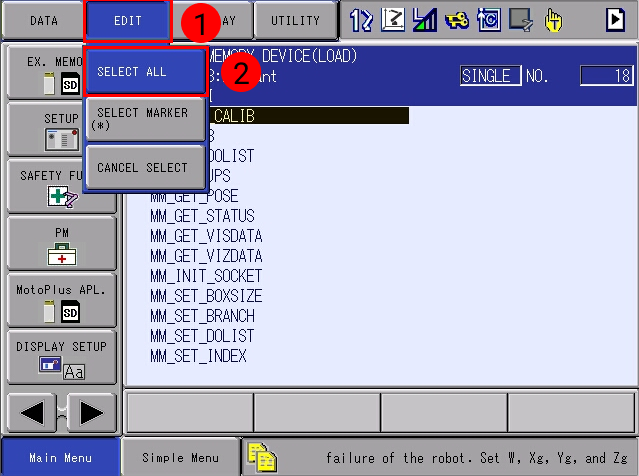
Maintenance mode で を選択します。
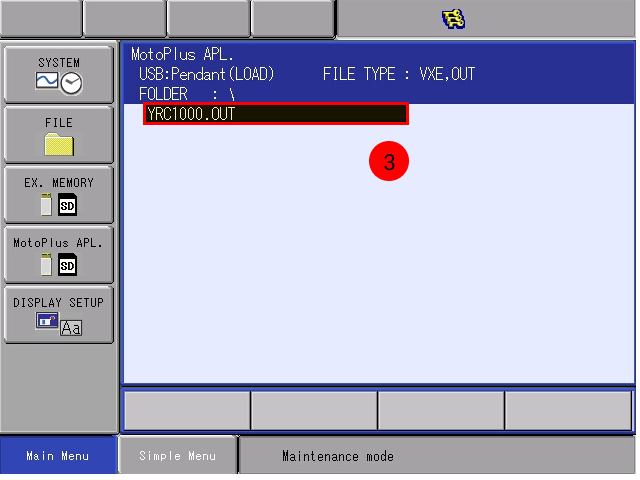
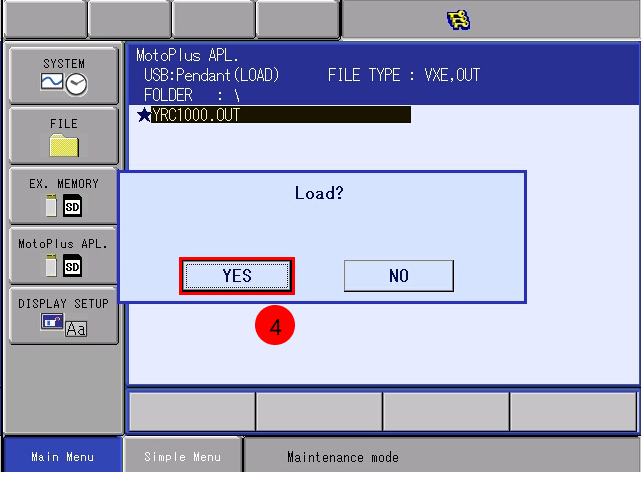
を選択し、 mm_module_yrc1000.out を選択します。次に、 Enter をクリックし、 YES を選択してインストールします。
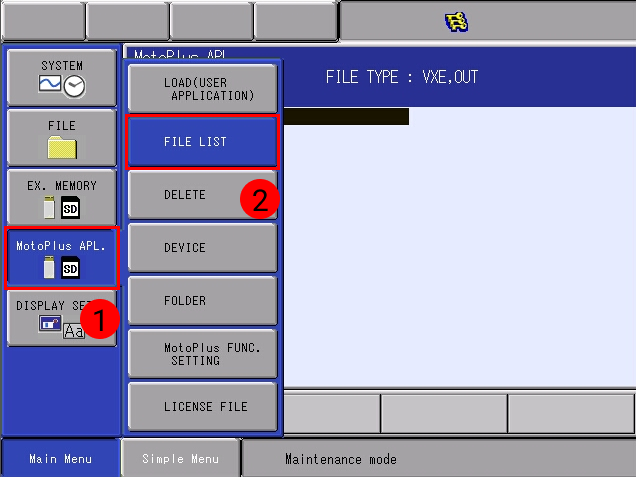
正常にインストールした後、 をクリックすればインストールされたファイルが表示されます。
フォアグラウンドプログラムファイルをロボットにロード¶
メインメニューキーを押さずにコントローラを再起動し、 を選択します。パスワード(デフォルトのパスワードは16個の9)を入力します。
パラメータを入力した後、 Enter をクリックして 管理者モード に切り替えます。

左下隅にある
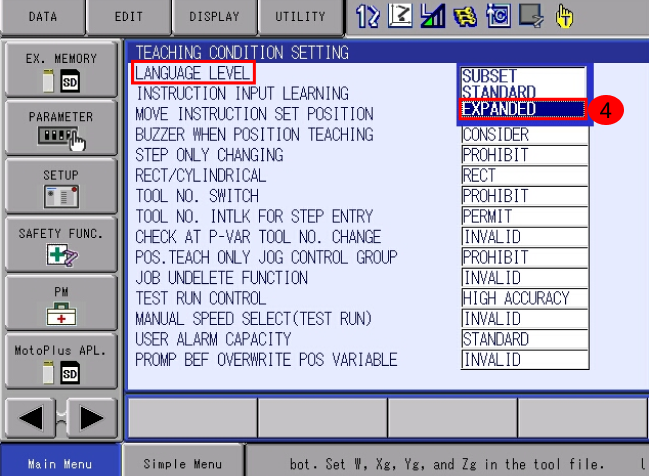
 をクリックして、 を選択します。LANGUAGE LEVELのドロップダウンメニューで EXPANDED を選択します。
をクリックして、 を選択します。LANGUAGE LEVELのドロップダウンメニューで EXPANDED を選択します。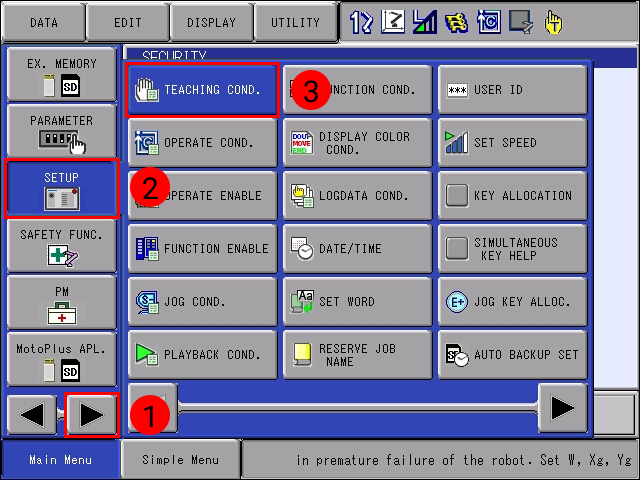
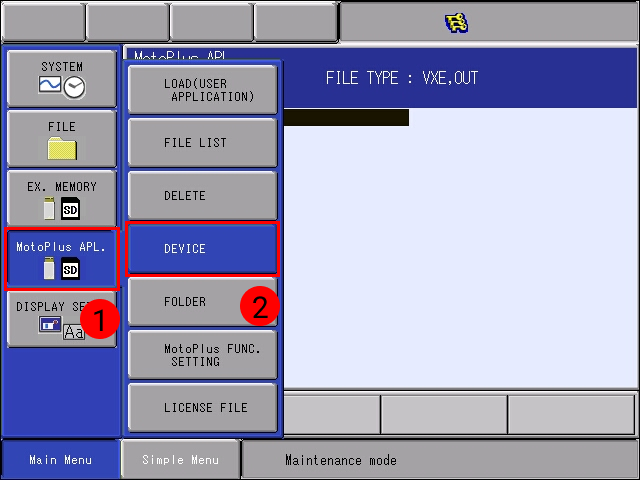
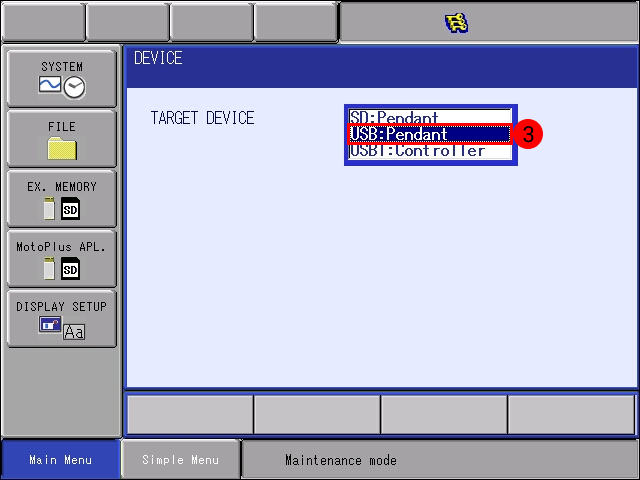
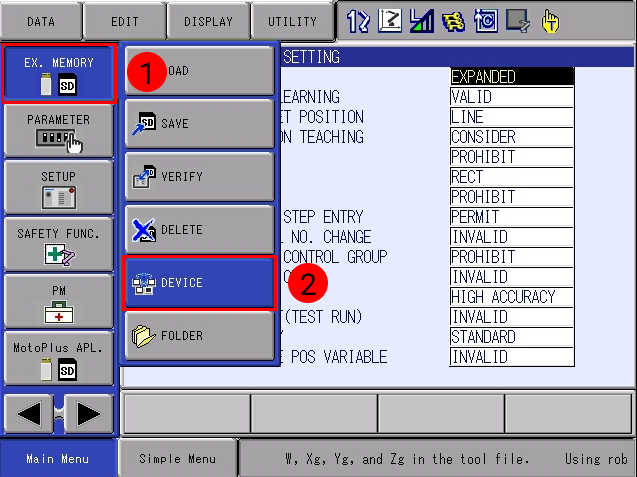
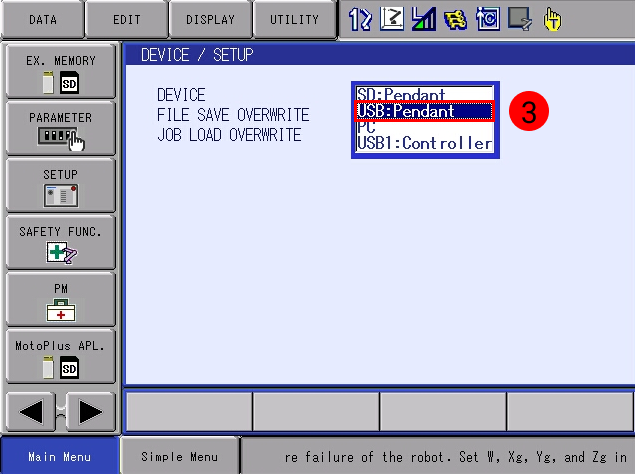
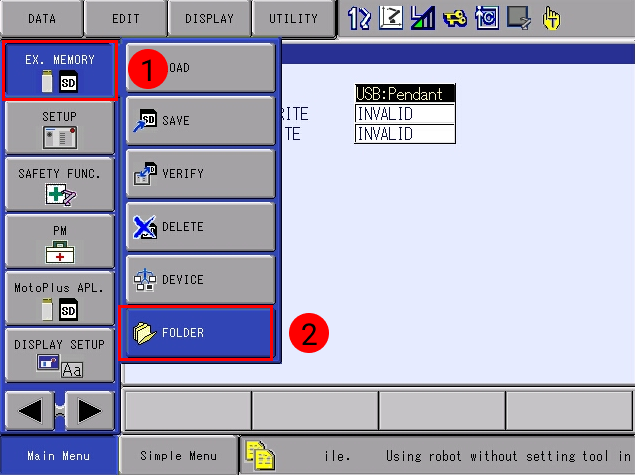
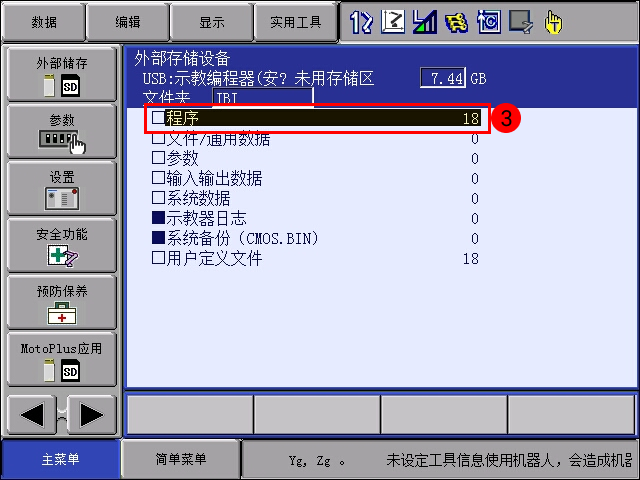
をクリックし、 USB:Pendant DEVICE を選択します。
をクリックし、リストから JBI を選択します。
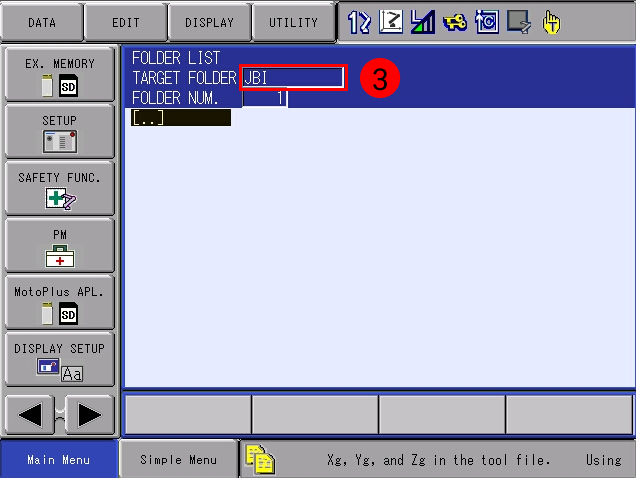
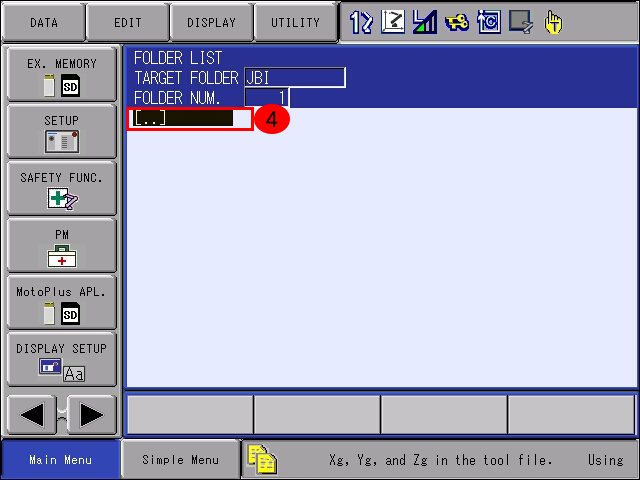
その後、 をクリックします。
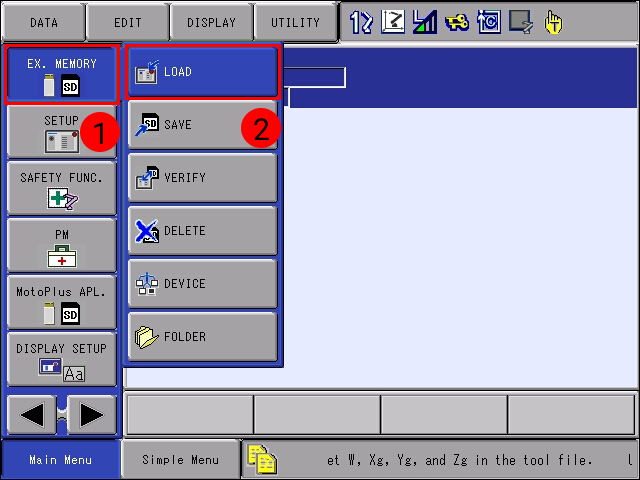
を選択します。
ENTER をクリックします。ポップアップ画面で YES を選択してフォアグラウンドプログラムをインストールします。

をクリックし、インストールされたプログラム一覧が表示されます。

ロボットの接続状態をテスト¶
接続をテスト¶
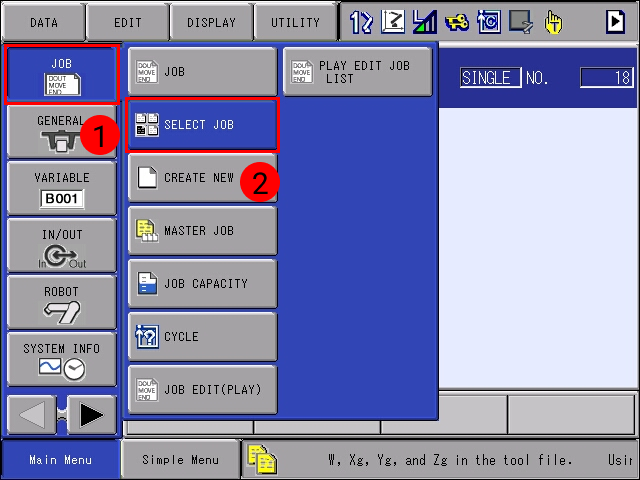
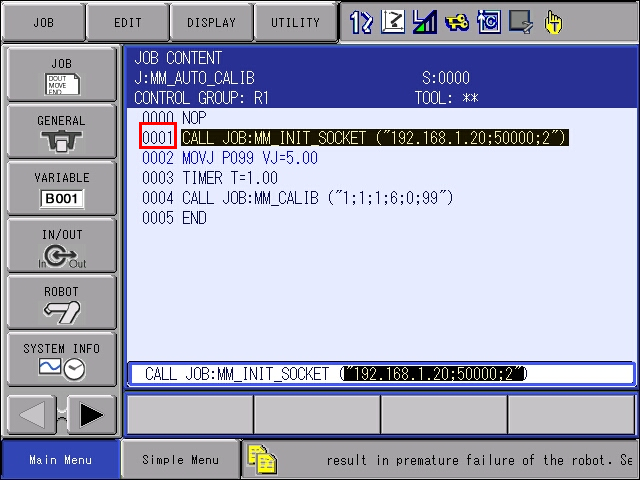
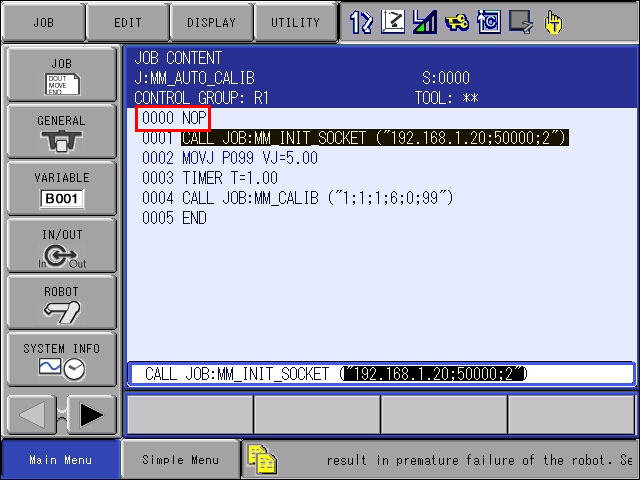
をクリックします。
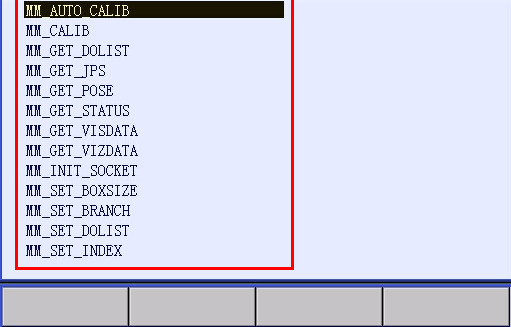
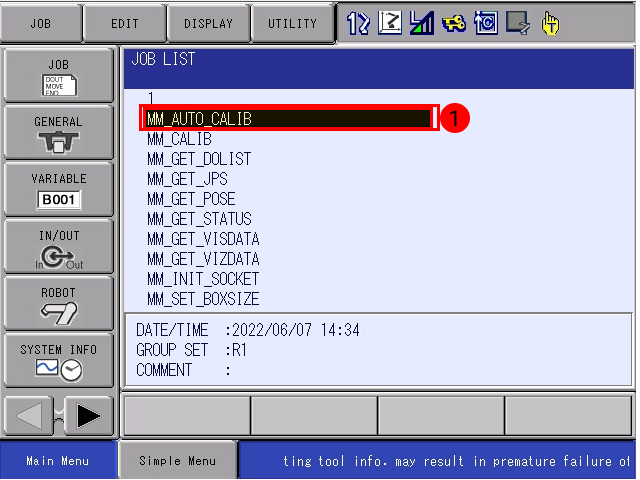
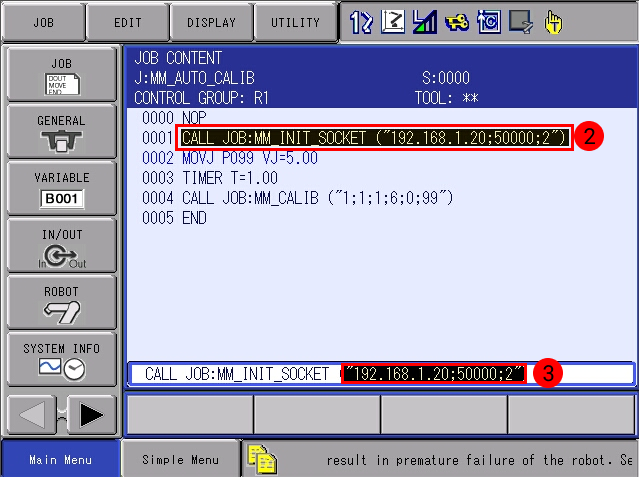
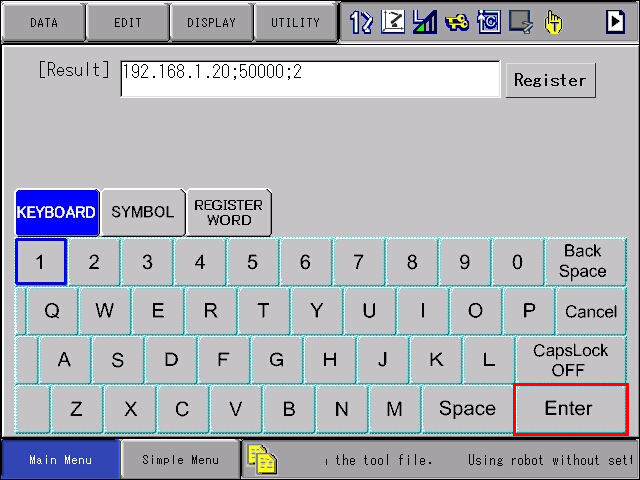
MM_AUTO_CALIB を選択し、 SELECT をクリックします。0001行を選択して下部にあるボックスでIPアドレスおよびポート番号を選択します。次に、 ENTER をクリックして変更画面に表示された後、IPアドレスを産業用コンピュータのIPアドレスおよびポート番号に変更します。
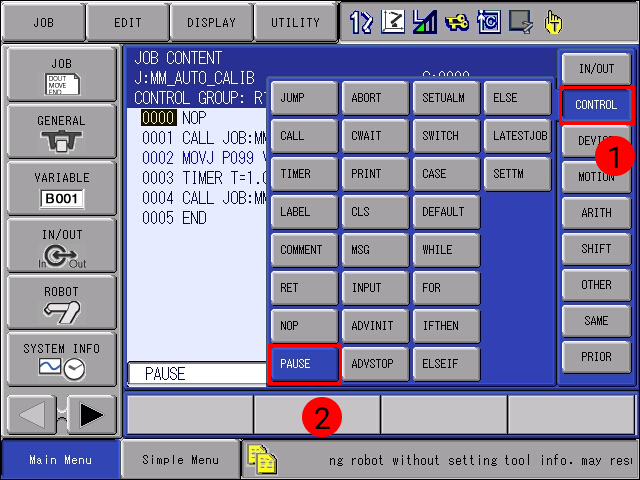
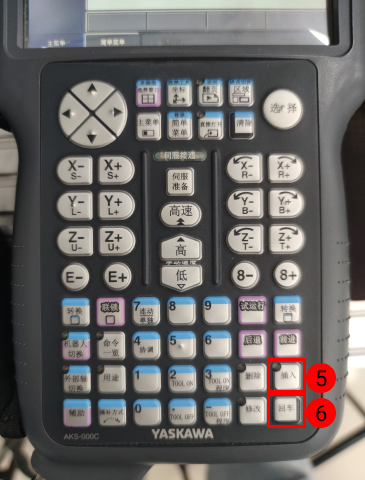
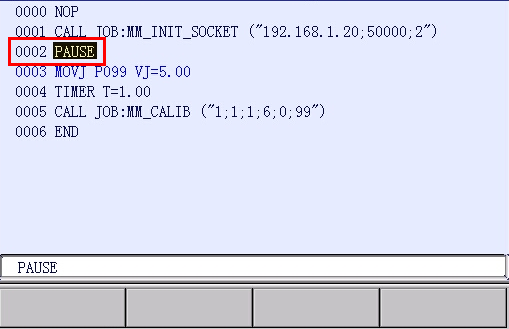
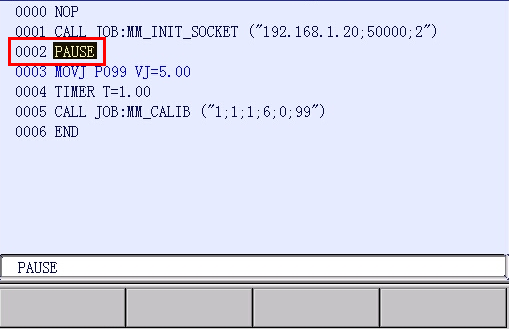
カーソルを0001行に移動し、 INFORMLIST を押します。ポップアップメニューで を選択し をクリックすれば、最初の行の後に PAUSE コマンドを挿入します。

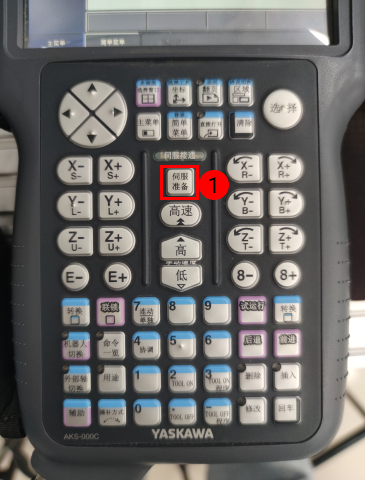
モードスイッチをTEACHモードに切り替え、 SERVO ON READY を押してから、背面のイネーブルスイッチを押しながらカーソルを最初の行に戻します。

注釈
これは、プログラムが最初の行から実行されるようにすることです。
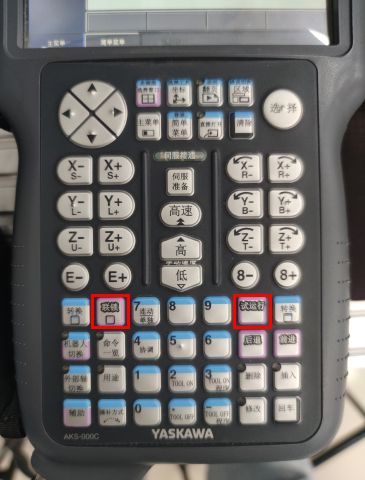
その後、 INTERLOCK と TEST START を同時に押します。黒いカーソルは、 PAUSE (一時停止)コマンドの2行目で自動的に停止します。
注釈
これは、試行によって通信が正常であるかどうかを判断することです。通信が正常な場合、プログラムは PAUSE コマンドで自動的に停止します。
接続に成功すると、Mech-Visionのログの「Console 」タブに以下のようなメッセージが表示されます。この場合、ロボットキャリブレーションに影響を与えないように PAUSE コマンドを削除する必要があります。