キャリブレーションの操作手順¶
本節では、標準インターフェース通信を用いたYASKAWAロボットの自動キャリブレーションについて説明します。
注意
開始する前に YASKAWA 標準インターフェースの通信設定 を参照してロボットプログラムの読み込みを完了する必要があります。
キャリブレーションするためのプログラムを開く¶
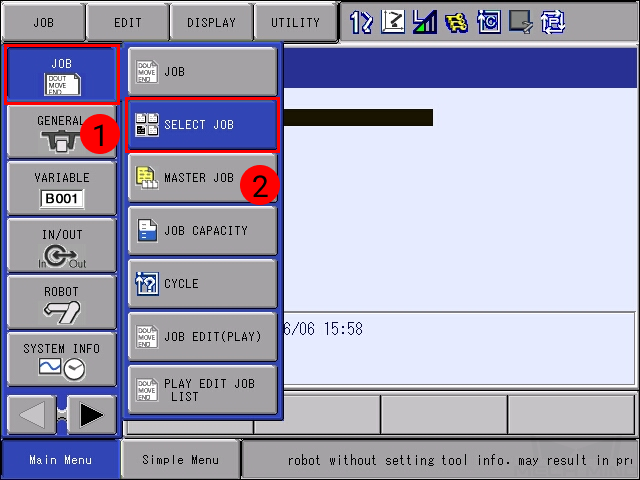
ロボットをティーチモードに切り替え、 をクリックします。カーソルを MM_AUTO_CALIB に移動して、ティーチペンダントの SELECT を押します。
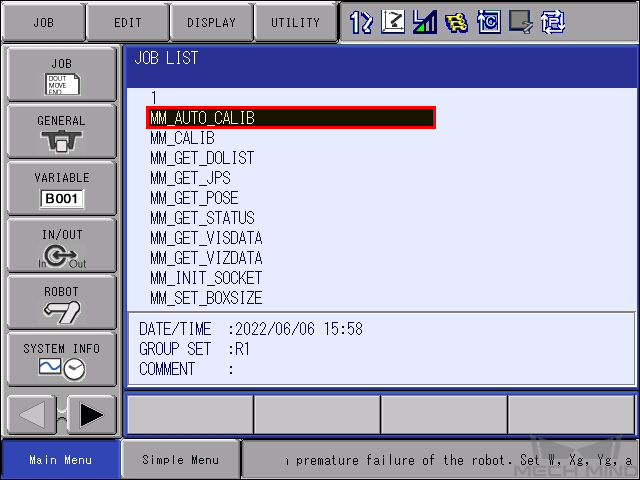
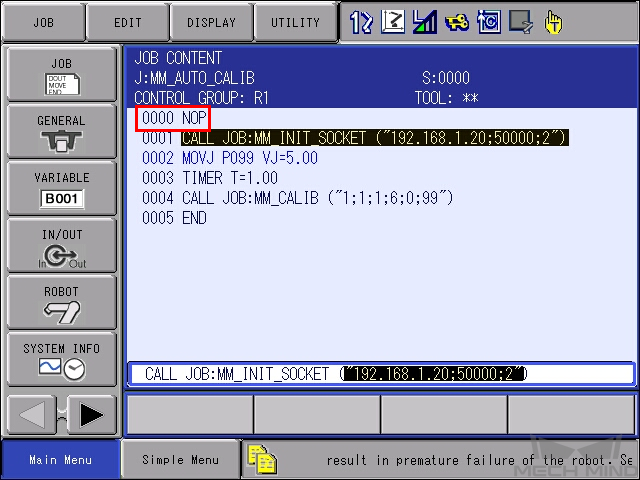
プログラムを選択した後、以下のような画面が表示されます。
キャリブレーションの最下層点を教示¶
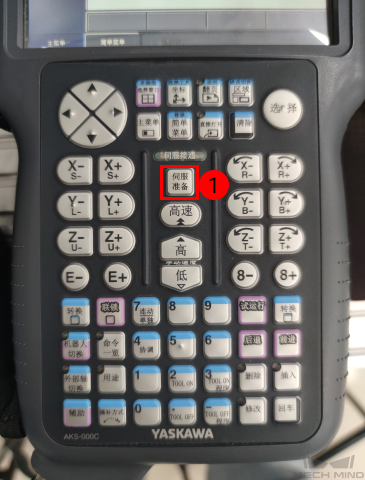
ロボットを手動でキャリブレーションの最下層点に移動させます。カーソルを MOVJ P099 VJ=5 に移動し、ティーチペンダント DIRECT OPEN を押します。
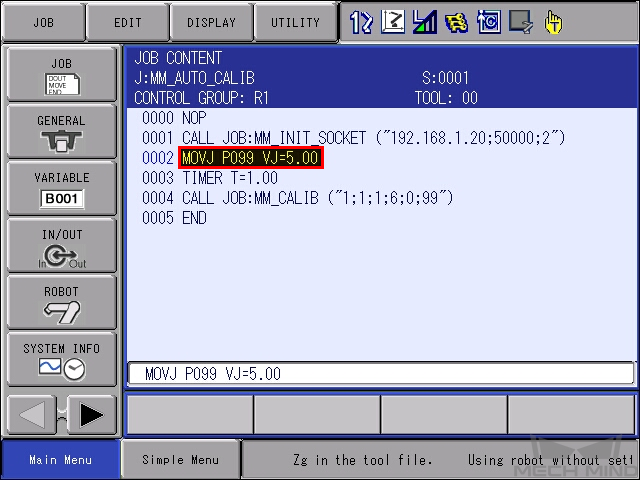
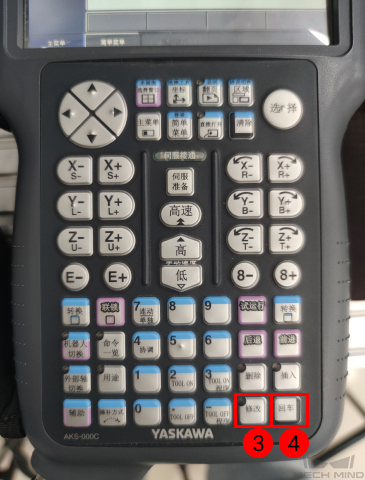
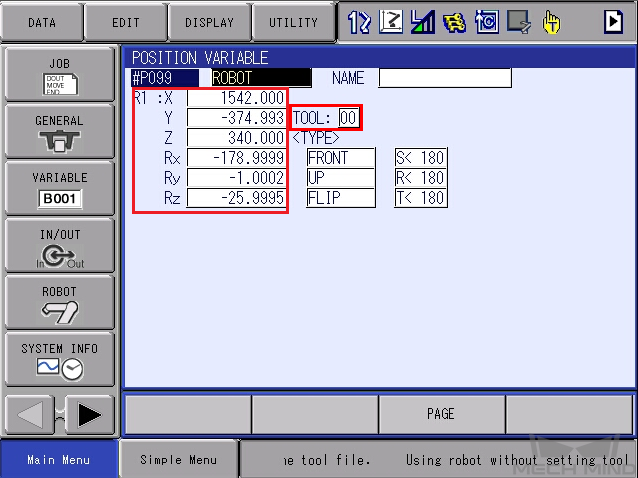
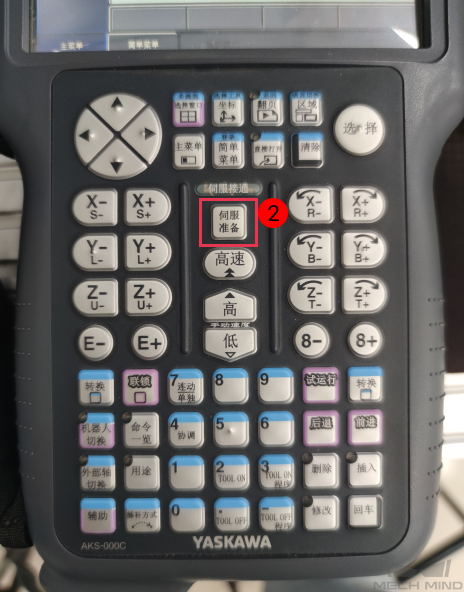
ティーチペンダントの SERVO ON READY を押した後、ティーチペンダントの背面のイネーブルスイッチを押しながら、 MODIFY を押してから ENTER を押します。位置変数 P099 を現在の位置に変更し、「TOOL」が 00 であることを確認します。

ティーチペンダント DIRECT OPEN をもう一度押すと、 JOB の画面に戻ります。
プログラムを実行¶
カーソルを0000行目に移動し、モードスイッチをPLAYモードに回し、ロボットを リピートモード に切り替えます。その後、ティーチペンダントの SERVO ON READY を押します。

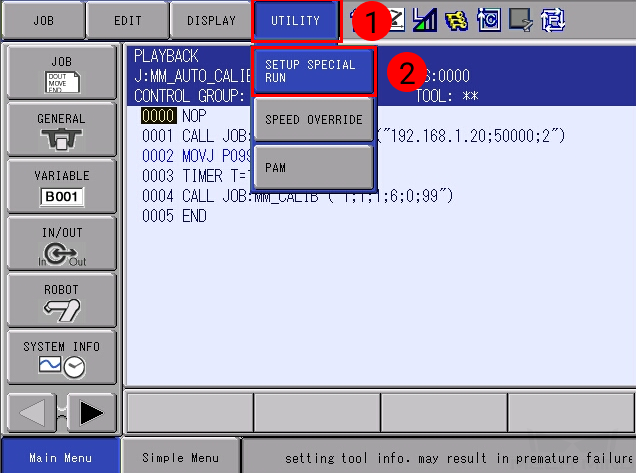
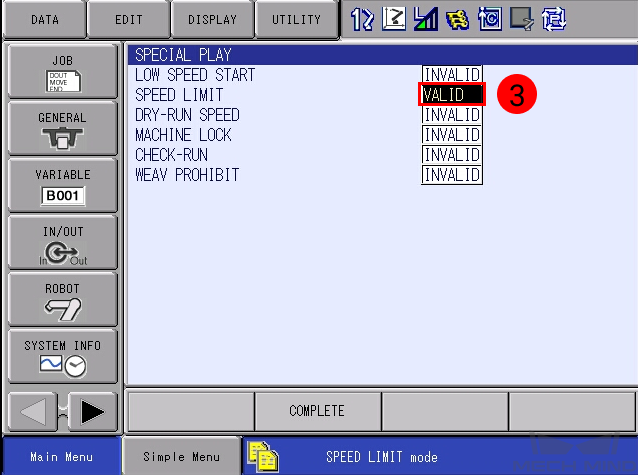
低い速度で動作する必要がある場合、 をクリックして、 SPEED LIMIT を VALID に変更します。
その後、 START ボタンを押します。ボタンが点灯すると、プログラムの実行が開始されます。

注意
異常が発生した場合は、すぐに PAUSE または EMERGENCY STOP ボタンを押してください。
Mech-VisionログバーのConsoleタブに、「キャリブレーションプロセスに入ります、Mech-Visionでキャリブレーションを実行してください」と表示されます。
Mech-Visionでキャリブレーションを実行¶
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーで を順番にクリックしてキャリブレーションツールを起動します。
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
Eye to Handの場合、 自動キャリブレーション(Eye to Hand) をご参照ください。
Eye in Handの場合、 自動キャリブレーション(Eye in Hand) をご参照ください。
注意
ロボットが60秒以内に次の経路点に到達しない場合、Mech-Visionはタイムアウトエラーが発生します。この場合、プログラム一覧からキャリブレーションするためのプログラムを再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。