位置姿勢をカスタマイズされた座標系に変換¶
機能¶
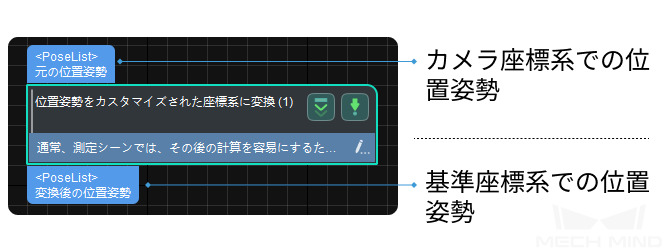
計算を容易にするために、測定対象物の中心位置姿勢を 基準座標系 に変換します。変換流れは以下の通りです。
カメラ座標系での位置姿勢を、最初にカスタマイズされた座標系での位置姿勢に変換します。
最初にカスタマイズされた座標系での位置姿勢を、基準座標系での位置姿勢に変換します。
ヒント
このステップが大型部品の測定シーンに使われる場合、最初にカスタマイズされた座標系は通常、部品座標系となります。
使用シーン¶
通常、 大型部品 の測定シーンに使用されます。前に 丸穴の中心位置姿勢と直径を計算 をつなぐ場合、丸穴を検出してカメラ座標系での丸穴の中心位置姿勢を出力します。前に 長穴の中心位置姿勢と長軸・短軸を計算 をつなぐ場合、長穴を検出してカメラ座標系での長穴の中心位置姿勢を出力します。
入力と出力¶
パラメータの調整説明¶
ファイルから位置姿勢を読み込む(位置姿勢の原点がロボット座標系にある)¶
- 位置姿勢のファイル
 をクリックし、表示される画面で最初にカスタマイズされた座標系の JSON ファイルを選択します。
をクリックし、表示される画面で最初にカスタマイズされた座標系の JSON ファイルを選択します。
ヒント
このステップが大型部品の測定に使われる場合、この座標系は通常、部品座標系となります。位置姿勢の変換ファイルを取得するには、Mech-Mind株式会社にお問い合わせください。
ファイルから位置姿勢を読み込む(位置姿勢の原点が自動車本体座標系にある)¶
- 位置姿勢のファイル
- をクリックし、表示される画面で2つ目のカスタマイズされた座標系の JSON ファイルを選択します。
ヒント
このステップが大型部品の測定に使われる場合、この座標系は通常、基準座標系となります。位置姿勢の変換ファイルを取得するには、Mech-Mind株式会社にお問い合わせください。