平面点群を抽出¶
機能¶
このステップの組合せにより、平面点群内の平面からのずれが大きい点を除去し、より平らかな平面点群を取得できます。
使用シーン¶
通常、 大型部品 の測定シーンに使用されます。前に 深度画像から点群を分割 をつなぎ、点群を取得します。後に 丸穴の中心位置姿勢と直径を計算 をつなぐ場合は丸穴を検出し、 長穴の中心位置姿勢と長軸・短軸を計算 をつなぐ場合は長穴を検出します。
入力と出力¶
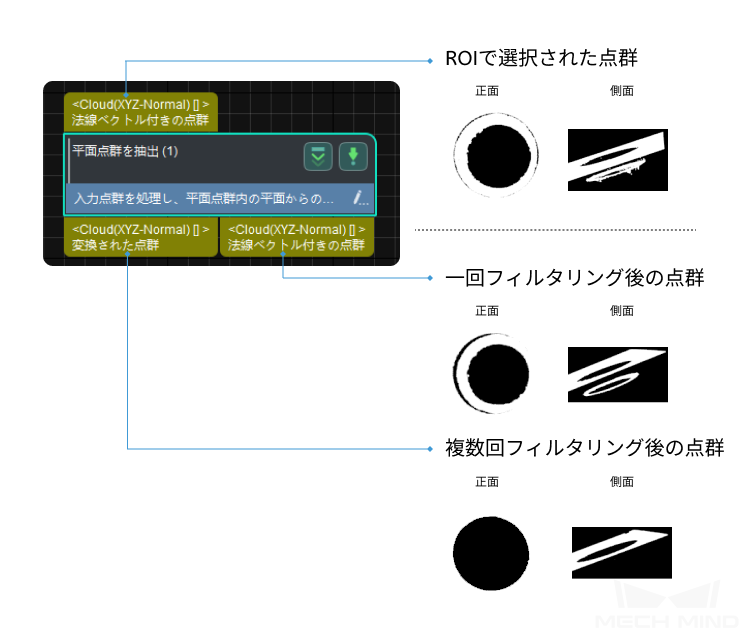
パラメータの調整説明¶
点のフィルタリング(点のフィルタリング)/ 点のフィルタリング(最初のフィルタリング2)/ 点のフィルタリング(再フィルタリング2)¶
- 最近隣接点の数
- パラメータ説明:このパラメータは、平面点群に隣接する点を優先的に除去するために使用されます。値が大きいほど除去される点が多くなり、値が小さいほど除去される点が少なくなります。初期値:30
- 標準偏差乗数
- パラメータ説明:このパラメータは、距離しきい値を計算するために使用されます。値が小さいほど除去される点が多くなり、値が大きいほど除去される点が少なくなります。初期値:2.0000
点のフィルタリング(最初のフィルタリング)/ 点のフィルタリング(再フィルタリング)¶
- 最大角度差
- パラメータ説明:このパラメータは、点の基準座標系のZ軸と点の法線ベクトルのZ軸との最大角度差(単位は度)を指定するために使用されます。点の基準座標系のZ軸とその点の法線ベクトルのZ軸との角度差がこの値より大きい場合、その点は除去されます。値が大きいほど保持される点が多くなり、小さいほど保持される点が少なくなります。初期値:3°