ようこそ
応用
ソフトウェアの使用ガイド
ロボットの通信設定
サポート
付録
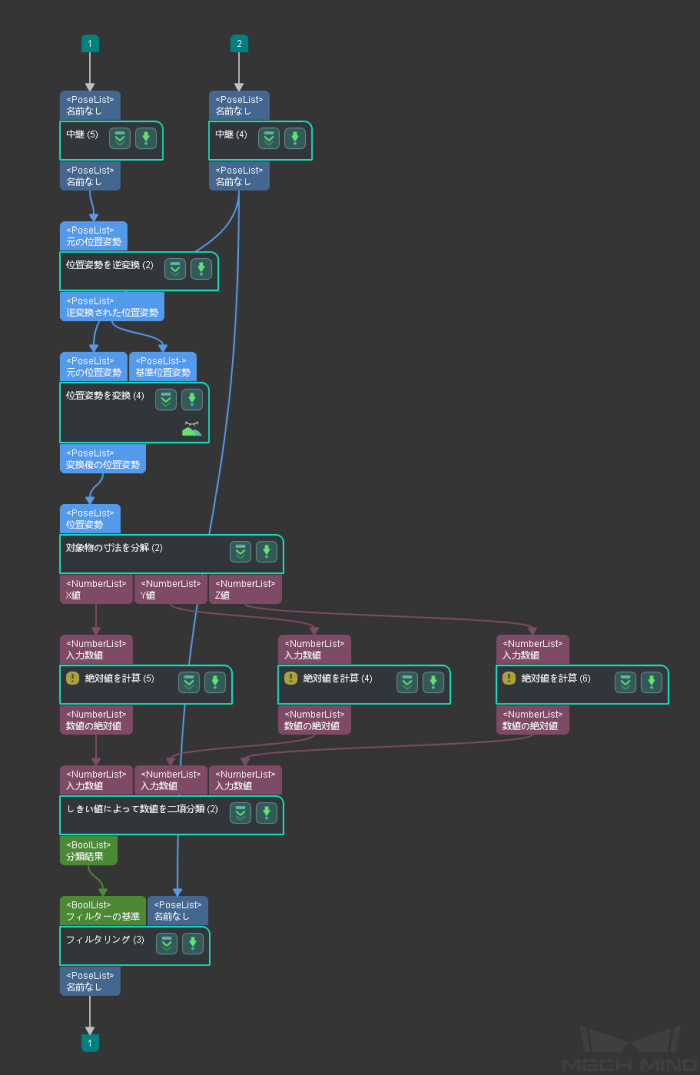
主な機能は、関心領域外の位置姿勢を除去し、その後の位置姿勢処理を高速化させることです。その構成を 図1に示します。
図1 ROI以外の位置姿勢を除去¶
各ステップの機能は以下の通りです。
位置姿勢を逆変換 により、関心領域の中心位置姿勢に対して逆変換を行います。 位置姿勢を変換 により、判断が必要な位置姿勢と逆変換後の関心領域の中心位置姿勢を入力し、判断が必要な位置姿勢の相対座標系を関心領域の中心位置姿勢の座標系に変換します。 対象物の寸法を分解 と 絶対値を計算 により、位置姿勢のXYZ座標の絶対値を取得します。 しきい値によって数値を二項分類 により、関心領域を設定し、XYZの絶対値が関心領域にあるかどうかを判断します。 フィルタリング により、関心領域外の位置姿勢を除去します。
位置姿勢を逆変換 により、関心領域の中心位置姿勢に対して逆変換を行います。
位置姿勢を変換 により、判断が必要な位置姿勢と逆変換後の関心領域の中心位置姿勢を入力し、判断が必要な位置姿勢の相対座標系を関心領域の中心位置姿勢の座標系に変換します。
対象物の寸法を分解 と 絶対値を計算 により、位置姿勢のXYZ座標の絶対値を取得します。
しきい値によって数値を二項分類 により、関心領域を設定し、XYZの絶対値が関心領域にあるかどうかを判断します。
フィルタリング により、関心領域外の位置姿勢を除去します。