부정확한 피킹의 원인 분석 및 문재 해결
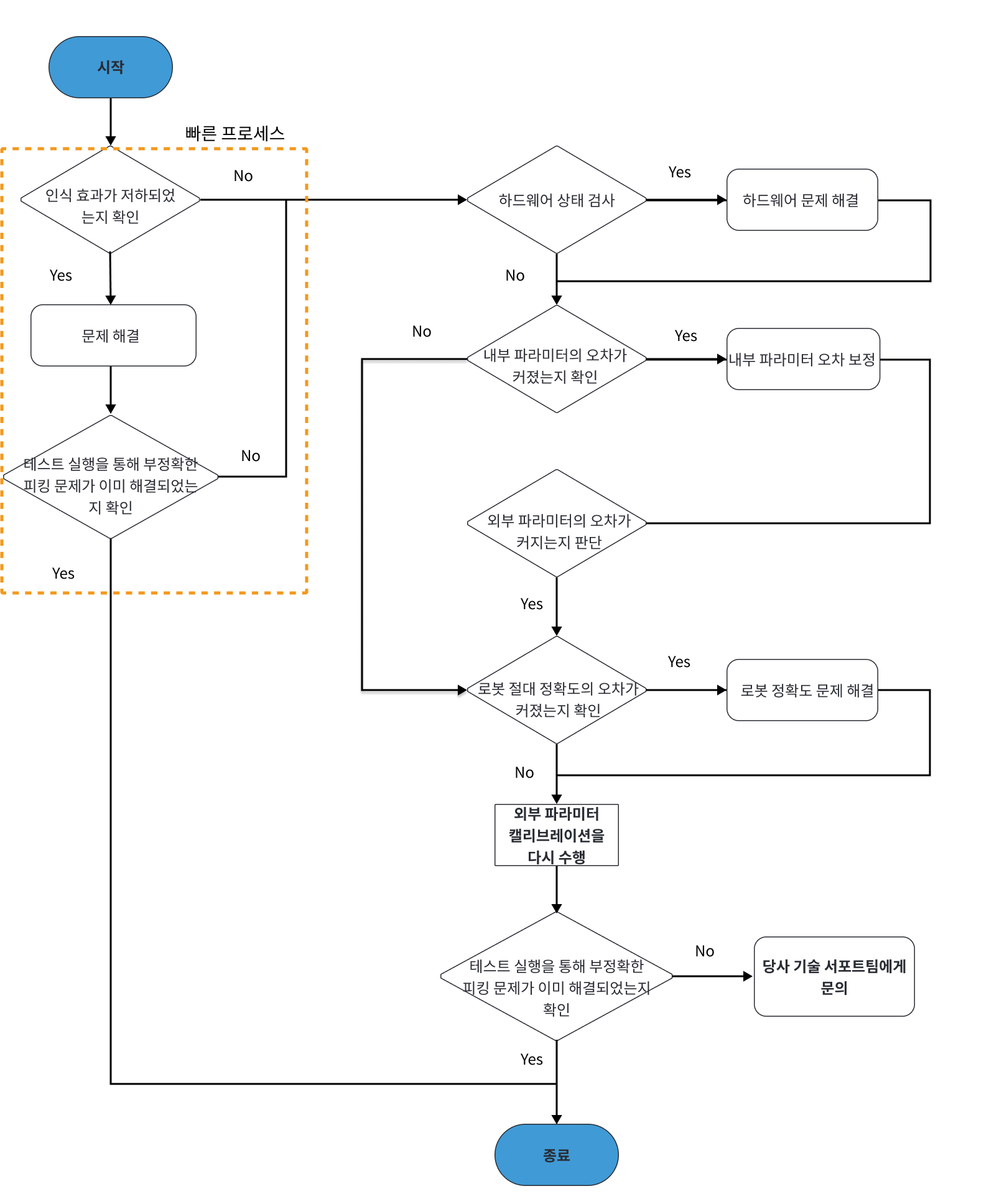
"로봇 피킹 부정확성" 문제가 발생하는 경우 일반적으로 다음 그림에 표시된 프로세스에 따라 문제를 해결할 수 있습니다.
| 다음 부분에서는 피킹 부정확성 문제 해결을 위한 일반적인 가이드만 제공합니다. 각 항목에 대한 구체적인 검사 방법, 검사 기준 및 오차 보정 방법은 상세한 작업 설명 내용을 참조하시기 바랍니다. |
빠른 프로세스
피킹 정확도에 미칠 가능성이 가장 높은 요소를 기반으로 먼저 인식 효과가 저하되었는지, 즉 (포인트 클라우드 품질이 저하되었는지, 딥 러닝 추론 효과가 저하되었는지(프로젝트에서 딥 러닝을 사용하는 경우) 및 3D 매칭 효과가 저하되었는지를 확인해야 합니다.
-
위 현상이 있다면 즉시 문제의 원인을 찾아 기술 지원 엔지니어에게 문의하여 문제를 해결하십시오. 그런 다음 테스트 실행을 수행하여 문제가 해결되었는지 확인합니다.
-
그렇다면 문재 해결이 완료됩니다.
-
그렇지 않은 경우 전체 프로세스에 따라 문제 해결을 계속하십시오.
-
-
위 현상이 없다면 전체 프로세스에 따라 문제 해결을 계속하십시오.
전체 프로세스
위의 “빠른 프로세스”에 따라 비전 프로젝트의 인식 효과가 저하되지 않으면 아래 프로세스에 따라 문제 해결을 계속하십시오.
-
-
하드웨어에 문제가 있으면 먼저 하드웨어 문제를 해결한 후 다음 단계를 진행하십시오.
-
하드웨어에 문제가 없으면 다음 단계를 실행하십시오.
-
-
-
커졌다면 먼저 내부 파라미터 보정을 수행한 후 다음 단계를 진행하십시오. 내부 파라미터 보정에 실패한 경우 기술 지원 엔지니어를 연락하여 해결하십시오.
-
하드웨어에 문제가 없으면 다음 단계를 실행하십시오.
-
-
외부 파라미터의 오차가 커지는지 판단합니다. 완료한 후 다음 단계를 수행하십시오.
-
-
커졌다면 먼저 로봇 정확도 문제를 해결한 후 다음 단계를 진행하십시오.
-
하드웨어에 문제가 없으면 다음 단계를 실행하십시오.
-
-
테스트 실행을 통해 부정확한 피킹 문제가 이미 해결되었는지 확인합니다.
-
그렇다면 문재 해결이 완료됩니다.
-
여전히 문제가 해결되지 않으면 당사 기술 서포트팀에게 문의하십시오.
-