카메라 내부 파라미터 검사
이 부분에서는 카메라 내부 파라미터를 검사하고 빠르게 보정하는 방법을 설명합니다.
내부 파라미터 검사 방법
| 내부 파라미터를 검사하기 전에 먼저 예열 도구에서 장치를 예열하세요. 그런 다음 캘리브레이션 보드 모델 선택 섹션을 참조하여 사용 중인 카메라 모델 및 실제 작업 거리에 따라 적합한 캘리브레이션 보드를 선택합니다. |
내부 파라미터 도구를 사용하여 카메라의 내부 파라미터를 검사할 때 다음과 같이 작업합니다.
-
1. 캘리브레이션 보드 배치 및 이미지 품질 확인에서 2D 이미지 및 뎁스 맵이 이미지 요구 사항에 부합되는지 확인합니다.
-
캘리브레이션 보드를 카메라의 FOV 내에 배치하고 카메라의 추천 작업 거리 내에 있고 카메라의 중심 축에 수직인지 확인합니다.

-
이미지 캡처하기 버튼을 클릭하여 캘리브레이션 보드의 2D 이미지와 뎁스 맵을 획득합니다. 캡처된 2D 이미지와 뎁스 맵은 다음과 같은 요구 사항을 충족해야 합니다.
-
캘리브레이션 보드의 원이 완전히 캡처되어야 합니다.
-
2D 이미지에서 캘리브레이션 보드는 과도하게 밝거나 어둡지 않고, 밝기가 균일하며, 모든 원이 선명하게 보여야 합니다.
-
뎁스 맵에서 캘리브레이션 보드의 원은 완전해야 합니다.
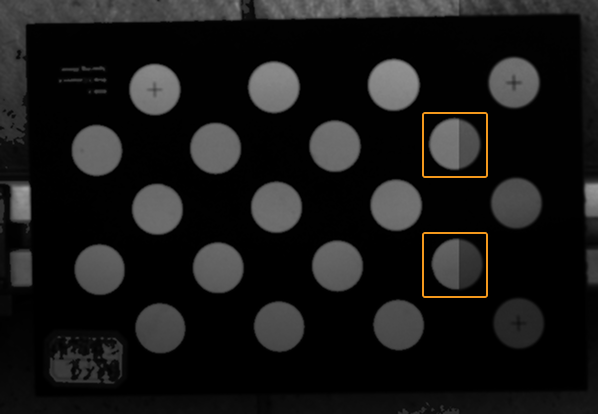
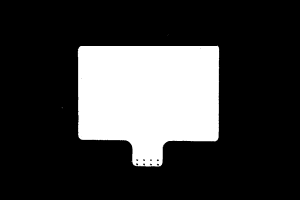
캘리브레이션 보드의 2D 이미지 예시는 아래와 같습니다.
이미지가 매우 어두워서 캘리브레이션 보드에 있는 원을 명확하게 식별할 수 없습니다. 이미지의 밝기가 균일하지 않아 캘리브레이션 보드의 원을 선명하게 식별할 수 없습니다. 캘리브레이션 보드에 있는 원이 완전하고 가장자리가 뚜렷하게 보입니다. 이미지가 매우 밝아서 캘리브레이션 보드에 있는 원을 명확하게 식별할 수 없습니다. 
획득한 2D 이미지가 이미지 요구 사항을 충족하지 않는 경우, 캘리브레이션을 위한 2D 및 3D 노출 파라미터 조정 내용에 따라 파라미터를 조정하세요.
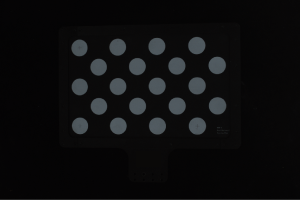
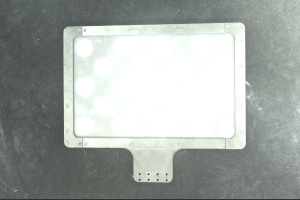
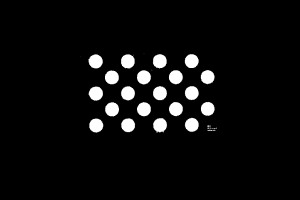
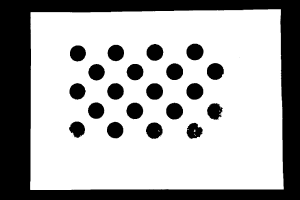
캘리브레이션 보드의 뎁스 맵 예시는 아래와 같습니다.
노출 시간이 매우 짧아서 캘리브레이션 보드에 있는 원이 불완전합니다. 캘리브레이션 보드에 있는 원 또는 캘리브레이션 보드 전체가 완전하고 누락된 부분이 없습니다. 노출 시간이 매우 길어서 캘리브레이션 보드에 있는 원의 일부 또는 전체가 누락됩니다. 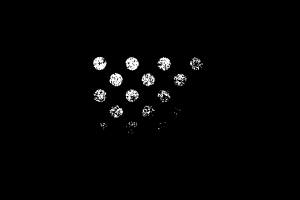
획득한 뎁스 맵이 이미지 요구 사항을 충족하지 않는 경우, 캘리브레이션을 위한 2D 및 3D 노출 파라미터 조정 내용을 참조하세요.
자세한 내용은 파라미터에 관한 설명 섹션을 참조하세요.
-
-
-
2. 캘리브레이션 보드 선택에서 캘리브레이션 보드의 사양을 설정합니다.
-
표준 캘리브레이션 보드를 사용하는 경우, 캘리브레이션 보드 카테고리에서 표준을 선택하고, 캘리브레이션 보드의 라벨을 기반으로 드롭다운 메뉴에서 사용 중인 모델을 선택합니다.
-
커스텀 캘리브레이션 보드를 사용하는 경우, 캘리브레이션 보드 카테고리에서 사용자 정의를 선택하고, 예시 이미지에 따라 캘리브레이션 보드 유형을 선택한 후, 행 · 열 · 간격 값을 설정합니다.
-
-
3. 내부 파라미터 검사 및 조정에서 내부 파라미터 검사하기를 클릭하여 카메라 내부 파라미터를 검사합니다. 검사가 끝나면 검사 결과를 나타내는 팝업 창이 나옵니다.
내부 파라미터 보정하기
이 기능은 내부 파라미터 오차가 매우 큰 문제를 해결하는 데 도움이 될 수 있습니다. 다음 시나리오에서 내부 파라미터 보정 기능을 사용하는 것이 권장됩니다.
-
내부 파라미터 검사에서 스칼라 차이 결과가 아래 테이블의 수치를 초과한 경우.
-
카메라 정확도가 요구 사항을 충족하지 않는 경우.
| 모델 | 스칼라 차이 값 |
|---|---|
DEEP-GL |
0.6% |
LSR L-GL, LSR S-GL, Laser L Enhanced |
0.5% |
LSR XL-GL |
0.4% |
PRO M-GL, PRO S-GL, PRO XS-GL, NANO-GL, NANO ULTRA-GL |
0.3% |
|
내부 파라미터 검사에 이상이 없으면 내부 파라미터 보정 시작 버튼을 클릭하여 내부 파라미터 보정 창을 열어 보정 작업을 진행합니다.
캘리브레이션 보드 배치
내부 파라미터 보정 기능을 사용할 때, 다음 요구 사항에 따라 캘리브레이션 보드를 배치해야 합니다.
-
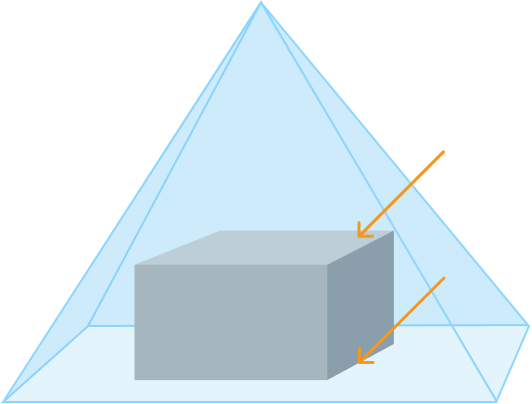
아래 그림과 같이 캘리브레이션 보드의 평면이 카메라 축에 최대한 수직이 되도록 배치합니다.
-
캘리브레이션 보드를 대상 물체의 상단 표면(평면 1)과 하단 표면(평면 2)에 각각 배치합니다. 평면 1과 평면 2의 높이 차이는 100mm 이상 되어야 합니다.
예를 들어 트레이에서 대상물을 피킹하거나 (디)팔레타이징 응용에서 캘리브레이션 보드를 트레이 또는 파렛트의 윗면과 밑면에 배치해야 합니다.
-
캘리브레이션 보드는 카메라 시야 내에 위치해야 합니다.
이 도구는 캘리브레이션 보드가 카메라 시야 내에 있는지 확인하는 기능을 지원합니다. 구체적인 사용 방법은 아래와 같습니다.
-
이미지 획득 시작 버튼을 클릭하고 캘리브레이션 보드를 현재 이 평면에서 이동시킵니다. 캘리브레이션 보드의 2D 이미지와 뎁스 맵은 고정된 속도(약 5초마다 한 번씩)로 업데이트됩니다.
-
2D 이미지와 뎁스 맵이 정상적으로 획득되면, 해당 위치가 카메라 시야 내에 있음을 나타냅니다.
-
카메라가 해당 평면의 시야를 확보하면, 이미지 획득 중지 버튼을 클릭합니다. 다음 내용을 참고하여 계속해서 이 평면의 데이터를 추가합니다.
-
그런 다음 제시된 내용을 참조하여 다른 평면의 데이터도 추가합니다.
-
이미지 획득 버튼을 클릭하면 다른 버튼은 일시적으로 사용 불가능합니다.
-
데이터 획득 및 검증
언급된 평면(평면 1 및 평면 2)에서 캘리브레이션 보드를 각각 다른 위치로 이동한 후, 데이터 획득' 버튼을 클릭하여 다른 위치에서의 데이터를 획득합니다. 검증을 통과한 데이터는 유효한 데이터입니다. 검증 표준:
| 검증 항목 | 값 |
|---|---|
최소 면적 커버리지 |
25% |
최소 길이 커버리지 |
50% |
최소 너비 커버리지 |
50% |
최소 데이터 세트 |
3 |
주의사항:
-
먼저 평면 1에서 데이터를 획득한 다음 평면 2에서 데이터를 획득합니다.
-
평면 2에 데이터가 있으면 평면 1의 데이터를 수정할 수 없습니다.
-
두 평면 모두에서 데이터 획득 및 검증을 완료한 후, 내부 파라미터 보정 버튼을 클릭하여 보정 프로세스를 시작합니다.
| 획득한 데이터가 검증을 통과하도록, 획득한 데이터의 커버 범위를 이용하여 캘리브레이션 보드의 위치를 조정할 수 있습니다. |
평면 1과 평면 2의 데이터를 확인하고 문제가 없으면 내부 파라미터 보정 버튼을 클릭하여 보정을 시작합니다. 오류 메시지가 나타나면 문제 해결 내용에 따라 문제를 해결하십시오.
내부 파라미터가 성공적으로 보정된 경우, 내부 파라미터 보정 결과 팝업 창에서 내부 파라미터 업데이트 버튼을 클릭하여 보정 후 값을 사용해 카메라의 정확도를 높입니다.
내부 파라미터 보정에 실패한 경우, 팝업 창 메시지에 따라 문제를 해결합니다.