스캔 모드
이 부분에서는 요구 사항을 충족할 수 있는 광도 이미지, 뎁스 맵과 포인트 클라우드를 얻기 위해 스캔 모드에서 파라미터를 조정하는 방법을 소개합니다.
| 이 부분 내용을 읽기 전에 파라미터 조정 내용을 먼저 읽어주시기 바랍니다. |
데이터의 퀄리티를 확인하기
다음 기준에 따라 데이터 퀄리티를 판단하십시오. 데이터 퀄리티가 좋지 않으면 다음 섹션 내용에 설명된 대로 관련 파미터를 조정하십시오.
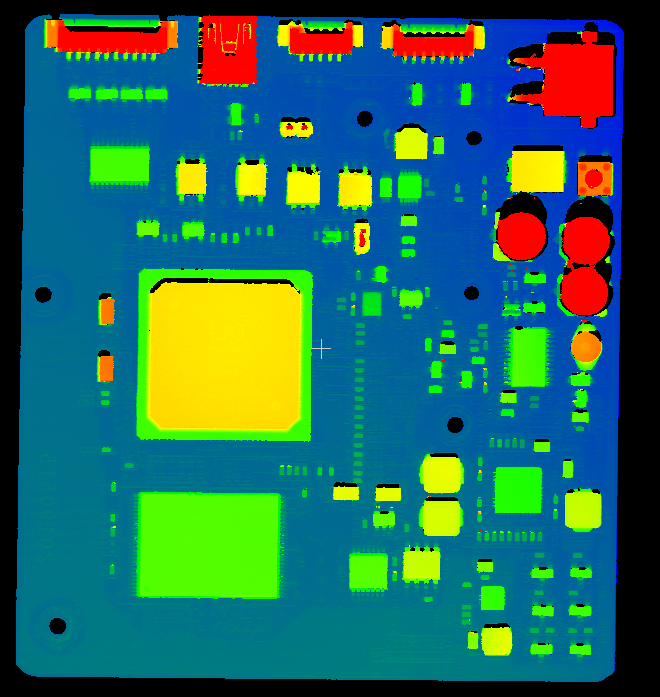
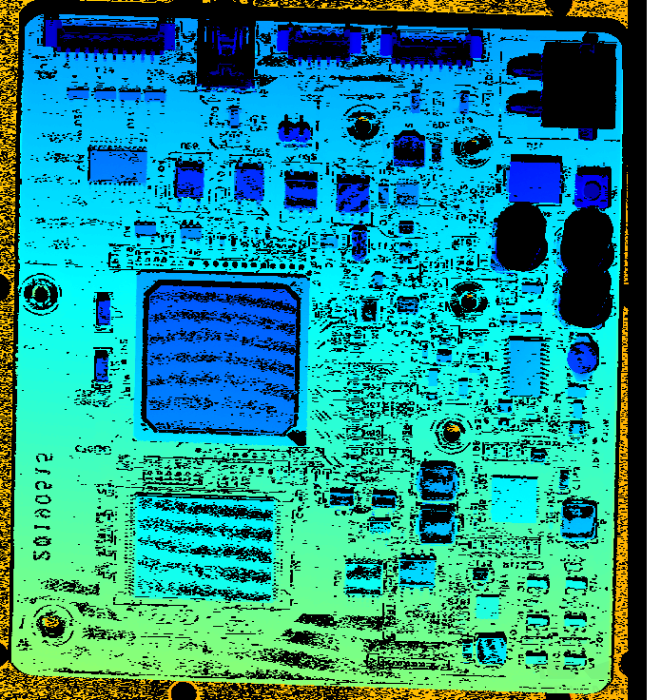
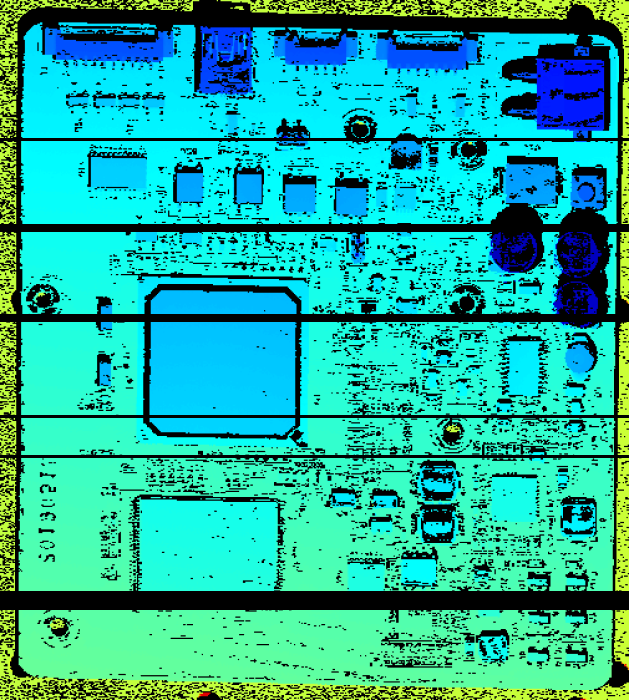
광도 이미지, 뎁스 맵과 포인트 클라우드의 데이터는 완전해야 합니다. 아래 표는 포인트 클라우드에 대한 예시입니다.
| 완전함 | 불완전함 | |
|---|---|---|
|
|
|
스캔 모드의 파라미터를 조정하기
다음 단계를 수행하십시오. 파라미터를 조정한 후 데이터 효과가 달라졌는지 여부를 확인하기 위해 데이터를 다시 획득해야 합니다.
| 스캔 모드에서 데이터 획득을 위해 레이저 프로파일러를 트리거하는 방법은 데이터 획득을 트리거하는 방식 및 데이터 획득을 트리거하는 프로세스 내용을 참조하십시오. |
-
스캔이 트리거되는 속도를 조정합니다.
엔코더를 사용하여 스캔 과정을 트리거하는 경우
엔코더 설정 범주의 파라미터를 조정합니다.
고정적인 속도로 스캔 과정을 트리거해야 하는 경우
트리거 빈도를 조정합니다.
-
스캔 설정 범주에 포함된 파라미터를 조정합니다.
-
다음 파라미터를 조정하면 일반적인 문제를 해결할 수 있습니다.
-
예를 들어 광도 이미지, 맵, 뎁스 맵 및 포인트 클라우드에서 대상 물체의 가장자리 왜곡(X축 방향의 진동으로 인한 편차)이 발생하면, X축 프로파일 정렬 파라미터를 조정할 수 있습니다.
-
예를 들어 광도 이미지, 맵, 뎁스 맵 및 포인트 클라우드에서 대상 물체의 표면 왜곡(Z축 방향의 진동으로 인한 편차)이 발생하면,Z축 프로파일 정렬 파라미터를 조정할 수 있습니다.
-
뎁스 맵과 포인트 클라우드에 노이즈 또는 잘못된 데이터가 많이 나타나면, 필터 범주의 파라미터를 조정할 수 있습니다.
-
-
(선택 사항) 포인트 클라우드의 Y축 해상도를 조정하면 포인트 클라우드의 종횡비를 수정할 수 있습니다.
|