사용자 정의 기준 좌표계
사용자 정의 기준 좌표계는 Mech-Eye Viewer에 뎁스 맵과 포인트 클라우드를 표시하는 데 사용되며 데이터 저장 기능을 통해 사용자 자체 정의한 좌표계에서의 포인트 클라우드를 저장할 수도 있습니다.
적용 시나리오
대표적인 적응 시나리오는 다음과 같습니다.
-
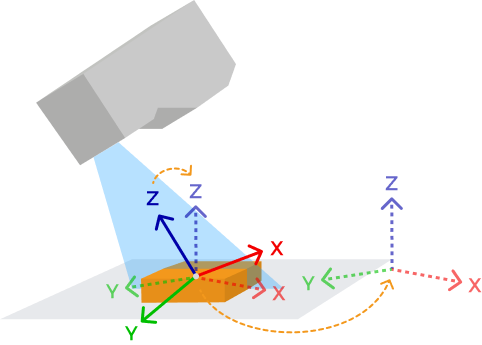
레이저 프로파일러는 대상 물체 바로 위에 설치되지는 않으나, 뎁스 맵과 포인트 클라우드가 위치한 좌표계의 Z축이 대상 물체가 위치한 평면 또는 대상 물체의 윗면과 수직이 되도록 각도를 조정해야 하는 경우가 있습니다.
-
이런 경우에 후속 데이터 처리 작업량을 줄이기 위해 사용자 정의 좌표계에서의 포인트 클라우드 데이터를 출력할 수 있었으면 좋겠습니다.
사용자 정의 기준 좌표계 조정
메뉴 바에서 툴 메뉴를 클릭하고 사용자 정의 기준 좌표계 옵션을 선택하여 사용자 정의 기준 좌표계 도구를 열 수 있습니다.
| 사용자 정의 기준 좌표계 도구를 사용하려면 데이터 캡처를 통해 포인트 클라우드를 먼저 획득해야 합니다. |
이 도구를 연 후, 초기 위치에서의 사용자 정의 기준 좌표계가 표시됩니다. 이럴 때, 사용자 정의 기준 좌표계는 레이저 프로파일러 좌표계와 겹치게 됩니다. 이 도구를 통해 사용자 정의 기준 좌표계의 위치와 방향을 조정할 수 있습니다.
구체적으로 다음과 같은 두 가지 방식으로 조정합니다.
-
사용자 정의 기준 좌표계의 위치와 방향을 드래그하여 직접 사용자 정의 좌표계를 조정합니다. 설정을 적용한 후 사용자 정의 기준 좌표계를 사용하여 데이터를 표시하거나 저장할 수 있습니다.
-
기준 좌표계를 생성하고 기준 좌표계에 따라 사용자 정의 기준 좌표계를 조정합니다. 상세한 작업 설명은 다음 섹선의 내용을 참조하십시오.
기준 좌표계에 따라 사용자 정의 기준 좌표계를 조정하기
기준 좌표계 정렬 패널에 있는 옵션을 사용하여 기준 좌표계를 기반으로 사용자 정의 기준 좌표계를 이동하거나 회전할 수 있습니다.
일반적으로 기준 좌표계는 대상 물체의 표면을 기반으로 생성되어야 하며 생성 후 좌표계를 드래그함으로써 위치 및 방향을 조정할 수 있습니다.
다음 단계를 수행하여 기준 좌표계를 생성하고 기준 좌표계를 기반으로 사용자 정의 기준 좌표계를 조정하십시오.
-
오른쪽 패널에서 기준 좌표계 생성 버튼을 클릭합니다.
-
포인트 클라우드를 조정하고 사용자 정의 기준 좌표계의 XY 평면으로 사용할 표면을 찾습니다.
-
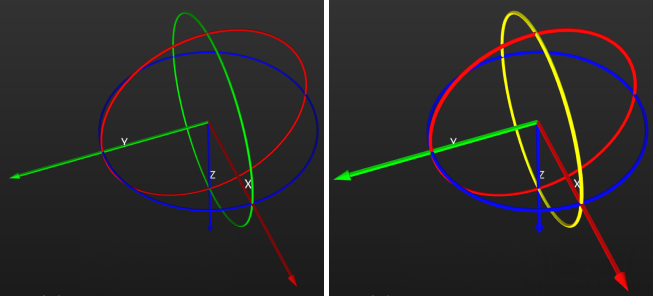
Shift 키를 누른 상태에서 마우스 왼쪽 버튼으로 포인트 클라우드를 클릭하여 3개의 포인트를 선택합니다. 3개의 포인트의 기능은 아래와 같습니다.
-
첫 번째 포인트는 기준 좌표계의 원점입니다.
-
두 번째 포인트는 X축의 정방향을 결정합니다.
-
세 번째 포인트는 Y축의 정방향을 결정합니다.
3개의 포인트를 선택하면 오른손 법칙에 따라 기준 좌표계가 생성됩니다.
-
-
포인트 클라우드를 회전하거나 크기 조정하여 기준 좌표계가 요구 사항을 충족하는지 확인하십시오.
-
3개의 포인트는 동일한 표면에 있는지 확인합니다.
-
Z 축 방향이 올바른지 확인합니다.
요구사항을 충족할 수 없으면, 기준 좌표계를 드래그함으로써 위치 및 방향을 조정하거나 단계3을 반복하여 기준 좌표계를 다시 생성합니다.
-
-
기준 좌표계가 생성된 후 오른쪽 패널의 완료 버튼을 클릭합니다.
-
기준 좌표계 생성 과정이 완료된 후 다시 조정하려면 오른쪽 패녈에서 기준 좌표계 편집 버튼을 클릭하십시오.
-
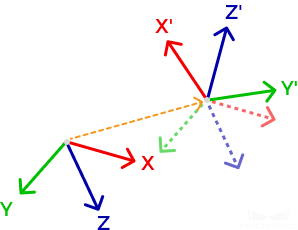
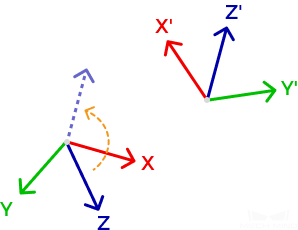
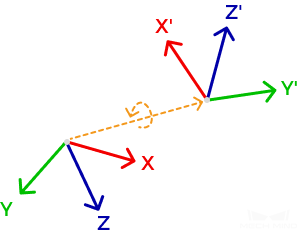
XYZ가 표시되는 좌표계는 사용자 정의 기준 좌표계이며 X’Y’Z'가 표시되는 좌표계는 기준 좌표계입니다.
-
-
오른쪽 패널의 기준 좌표계 정렬 풀다운 메뉴에서 필요한 옵션을 선택한 후 확인 버튼을 클릭합니다.
기준 좌표계 정렬 각 옵션에 관한 설명은 아래의 기준 좌표계 정렬 옵션 관련 설명 내용을 참조하십시오. -
사용자 정의 기준 좌표계에 대한 조정이 끝나면 오른쪽 하단에 있는 적용 버튼을 클릭합니다. 적용 후 사용자 정의 기준 좌표계를 사용하여 데이터를 표시하거나 저장할 수 있습니다.
-
리셋 버튼을 클릭하면 사용자 정의 기준 좌표계를 레이저 프로파일러 기준 좌표계와 완전히 겹치게 되는 초기 상태로 재설정할 수 있습니다.
-
사용자 정의 기준 좌표계에 관한 설정이 적용된 후 기준 좌표계 관련 설정 사항은 저장되지 않습니다.
-
기준 좌표계 정렬 옵션 관련 설명
다음은 기준 좌표계 정렬 패널에 있는 각 옵션과 일반 적용 시나리오에 관한 설명입니다.
| 옵션 | 설명 | 적용 시나리오 |
|---|---|---|
원점을 겹치기 |
원점이 기준 좌표계의 원점과 겹치게 하도록 사용자 정의 좌표계를 평행이동합니다(회전 없음).
|
레이저 프로파일러가 대상 물체 바로 위에 장착되어 있지는 않지만, 레이저 프로파일러는 대상 물체 바로 위에 있을 땡의 뎁스 맵과 포인트 클라우드를 출력해야 합니다. |
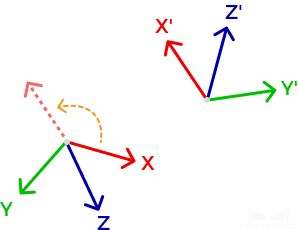
X축을 평행하게 만들기 |
X축이 기준 좌표계 X축의 정방향과 일치하도록 사용자 정의 좌표계를 회전합니다(평행 이동 없음).
|
레이저 프로파일러는 대상 물체 바로 위에 장착되지 않고 각도가 기울어져 있습니다. 그러나 출력 데이터에는 축 중 하나에 대한 특정 각도 요구 사항이 있습니다. 예를 들어, Z축이 대상 물체 표면에 수직되어야 하는 시나리오입니다. |
Y축을 평행하게 만들기 |
Y축이 기준 좌표계 Y축의 정방향과 일치하도록 사용자 정의 좌표계를 회전합니다(평행 이동 없음).
|
|
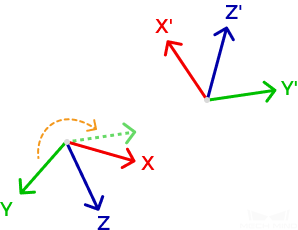
Z축을 평행하게 만들기 |
Z축이 기준 좌표계 Z축의 정방향과 일치하도록 사용자 정의 좌표계를 회전합니다(평행 이동 없음).
|
|
좌표계를 겹치기 |
사용자 정의 좌표계를 평행 이동하고 회전하여 기준 좌표계와 정확히 일치하도록 합니다.
|
출력한 뎁스 맵과 포인트 클라우드에 좌표계 원점은 대상 물체의 표면에 위치해야 하며 Z축은 대상 물체 표면에 수직되어야 합니다. |
“사용자 정의 기준 좌표계” 기능을 사용하기
사용자 정의 기준 좌표계는 Mech-Eye Viewer에 뎁스 맵과 포인트 클라우드를 표시하는 데 사용되며 데이터 저장 기능을 통해 사용자 자체 정의한 좌표계에서의 포인트 클라우드를 저장할 수도 있습니다.
-
사용자 정의 기준 좌표계에서 뎁스 맵과 포인트 클라우드를 표시하려면 다음 단계를 수행합니다.
-
데이터 표시 영역에서 뎁스 맵 또는 포인트 클라우드로 전환합니다.
-
왼쪽 표시줄 상단에서 기준 좌표계의 풀다운 메뉴를 클릭하여 사용자 정의를 선택합니다. 뎁스 맵과 포인트 클라우드는 사용자 정의 기준 좌표계에서 표시됩니다.
좌표계 설정은 뎁스 맵과 포인트 클라우드에 모두 적용됩니다. -
-
사용자 정의 기준 좌표계에서의 포인트 클라우드를 저장하려면 데이터 저장 창에서 포인트 클라우드를 선택하고 기준 좌표계의 풀다운 메뉴에서 사용자 정의 옵션을 선택하십시오.