FANUC(发那科)标定操作流程¶
在开始本节内容之前,请确保:
已参照 FANUC(发那科)标准接口程序烧录 完成机器人程序烧录,并与 Mech-Center 建立连接。
了解 机器人手眼标定使用指南 中的内容。
本节标定内容通常用于使用接口进行通信,且需要多次进行标定的情况。如有以下两种情况,可直接跳过本文:
标定步骤¶
标定主要包含以下五步:

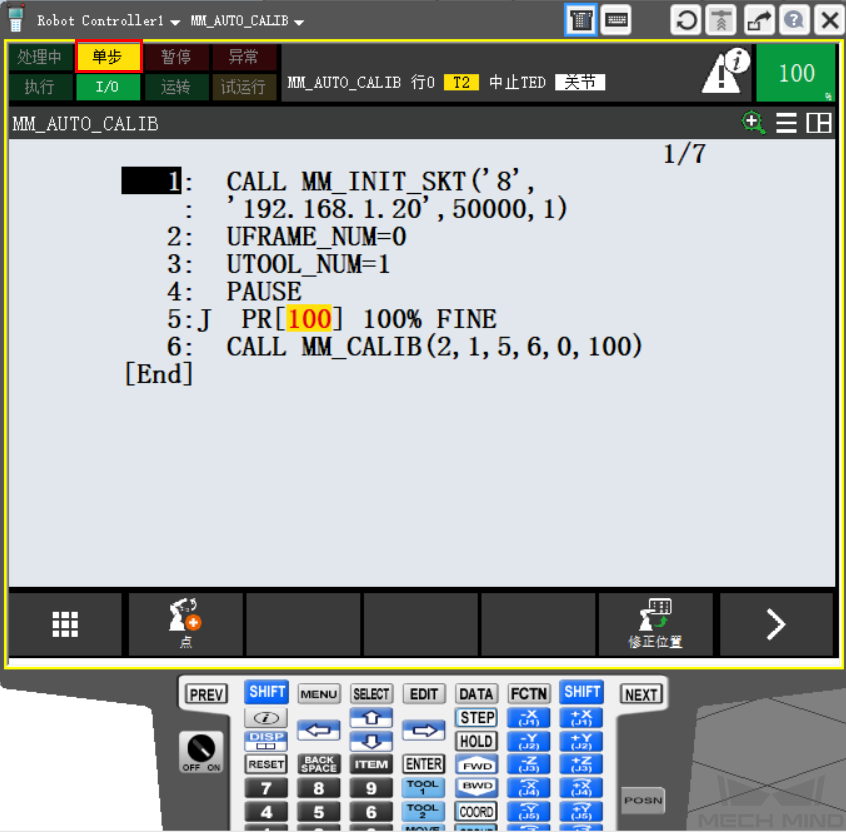
示教标定起始点¶
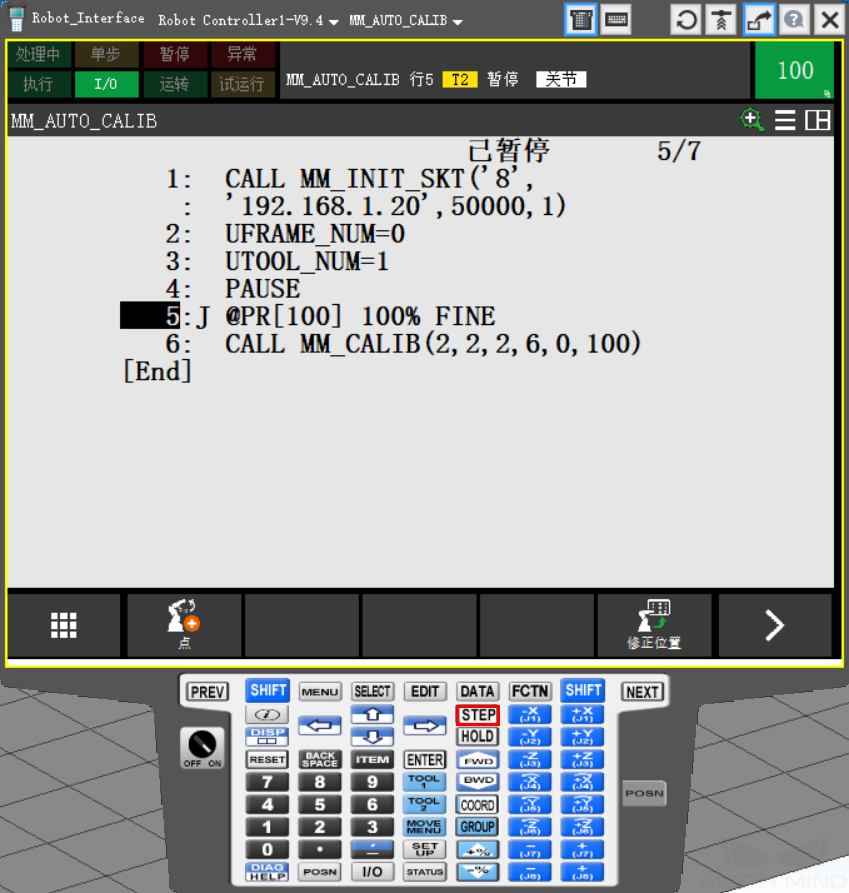
打开程序后,单击示教器上的 STEP,机器人切换至单步运行模式,此时示教器上方显示屏上 单步 变为黄色。

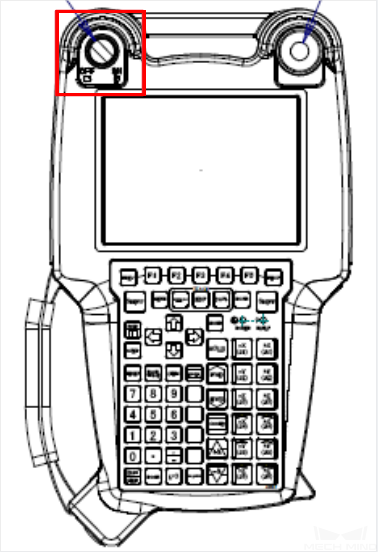
按下示教器背部的使能开关(任一均可)。

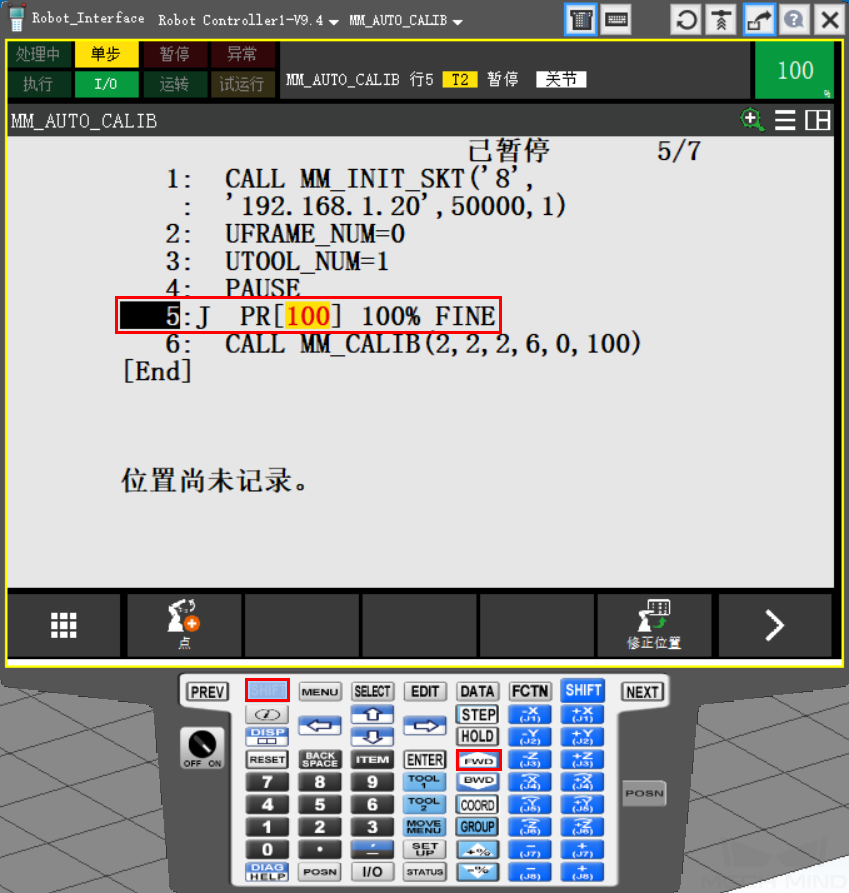
将光标移动至第五行指令,并同时按住 SHIFT 和 FWD ,运行第五行指令。
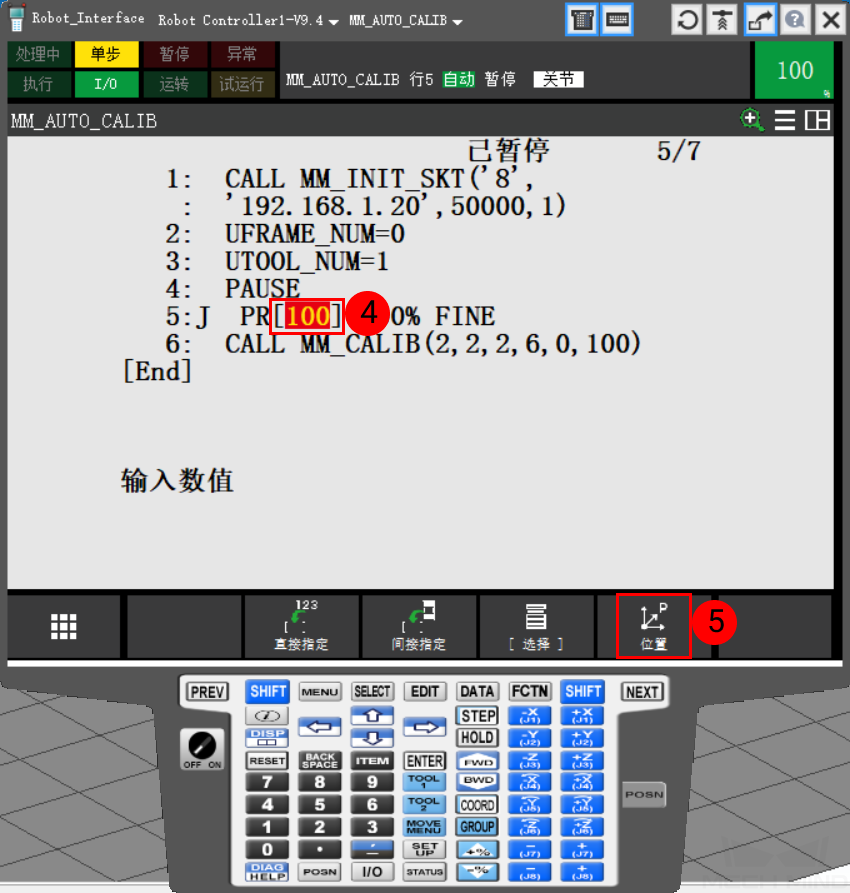
将光标移动至 [100],然后依次单击 。
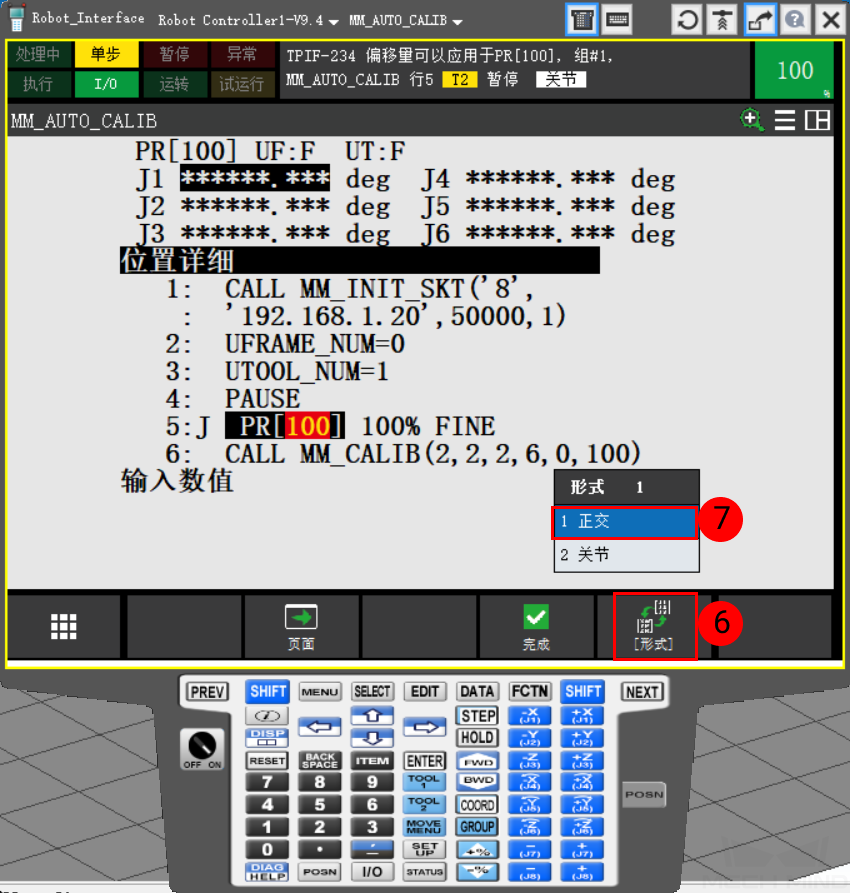
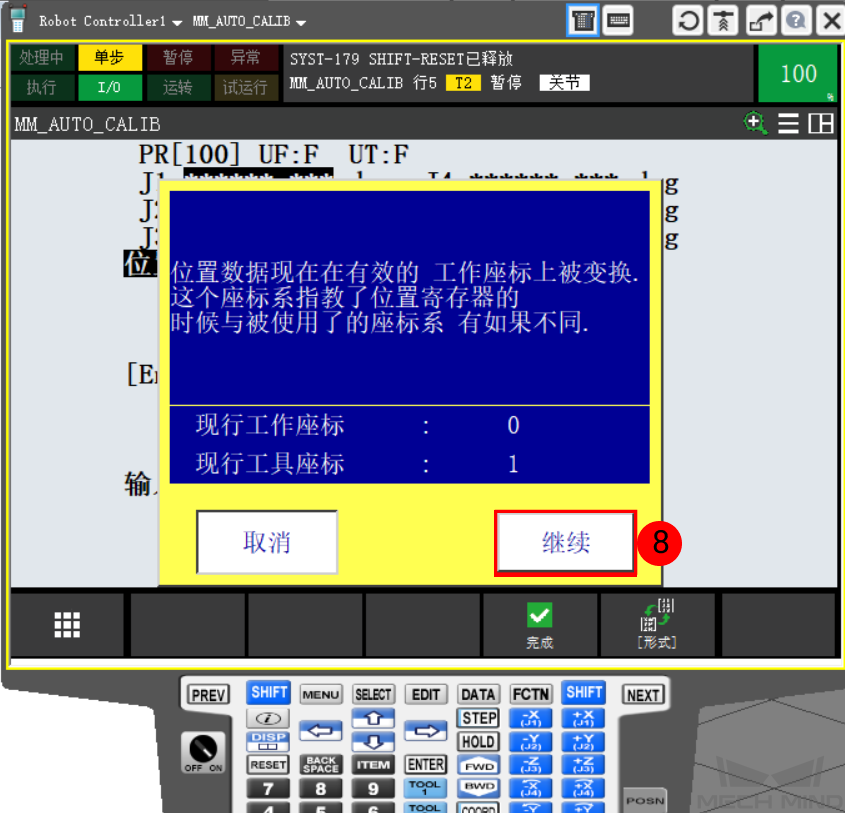
在弹出的页面中单击 继续 ,然后单击 完成 。

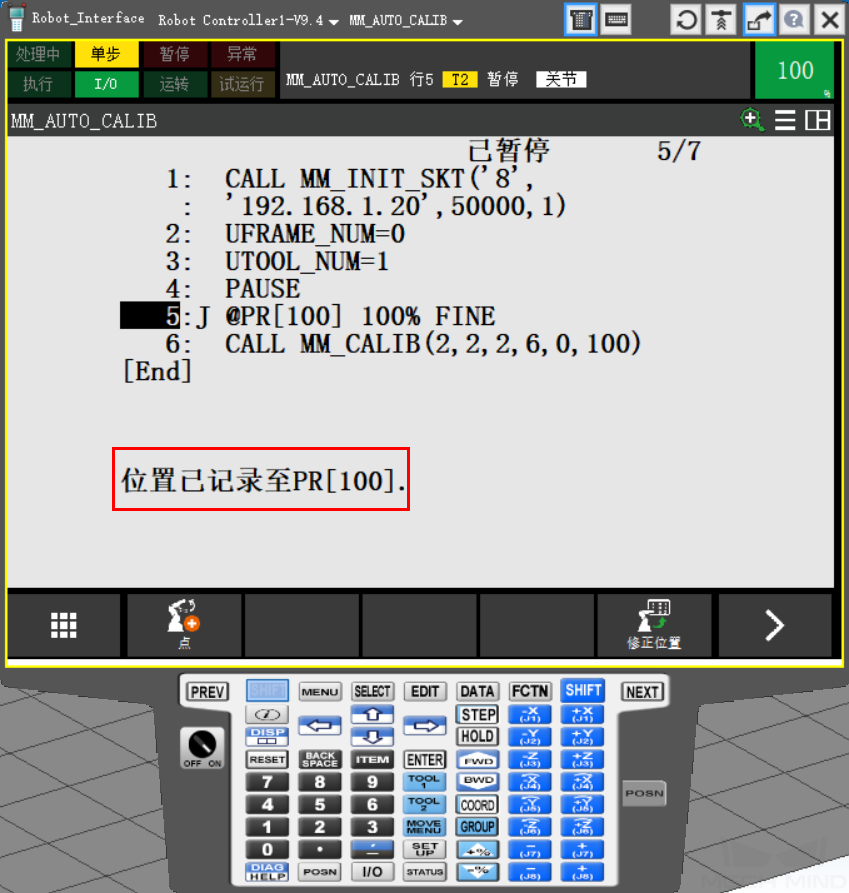
将光标移动至第五行指令开头,如下图所示。然后同时单击示教器上的 SHIFT 和 修正位置 ,示教器上显示 “位置已记录至PR[100]” 。

单击示教器上的 STEP ,此时示教器上方显示屏上 单步 变为灰色,退出单步运行模式。
运行程序¶
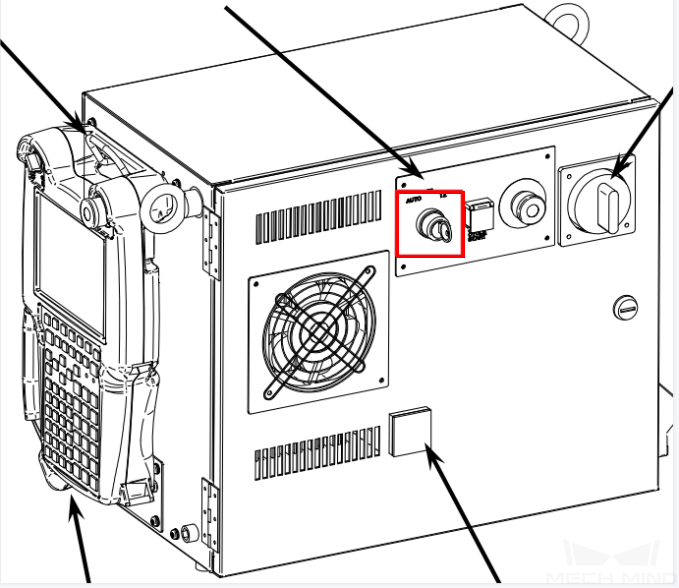
将机器人切换至自动模式:示教器上的开关转到 OFF,控制柜上的钥匙开关转到 AUTO,如下图所示。
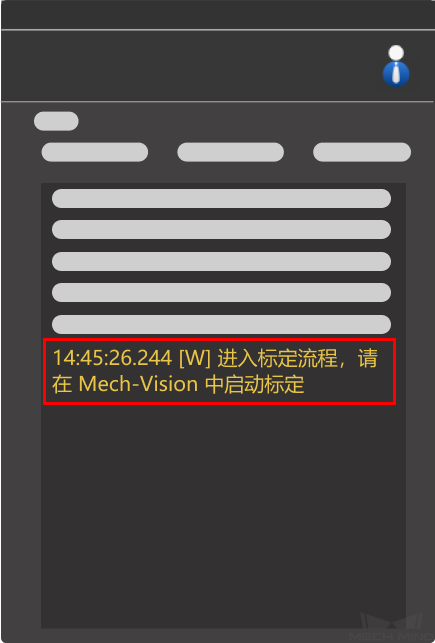
按下控制柜上的绿色按钮,标定程序自动运行。Mech-Center 日志中显示如下,Mech-Vision 可设置相应的参数进行标定。
打开 Mech-Vision 标定工具¶
启动 Mech-Vision 软件,依次单击 ,打开标定工具。

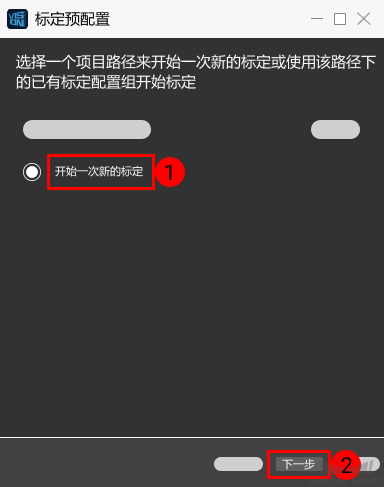
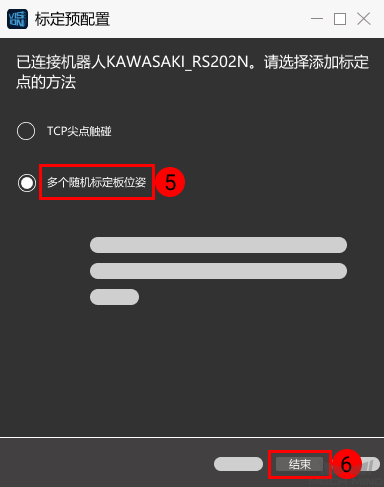
选择 开始一次新的标定 ,选择标定安装方式,随后选择 多个随机标定板位姿 ,进入标定界面。

提示
如未检测到机器人,则表示连接异常,请重新运行机器人程序。
设置参数并执行标定过程¶
按照标定工具的步骤,设置完标定参数后,点击 沿设定路径移动机器人并拍照 。
注意
如果机器人在 60 秒内没有到达下一个标定点,Mech-Vision 会发出超时报错,此时需要在机器人上重新选定 MM_AUTO_CALIB 程序,并在 Mech-Vision 中按照提示重新开始标定。