Kawasaki (川崎)烧录流程说明¶
本节介绍如何主控 Kawasaki 机器人,包含以下4步:
检查控制柜及软件版本¶
控制柜:E 系列或 F 系列。
建立网络连接¶

设置 IP¶
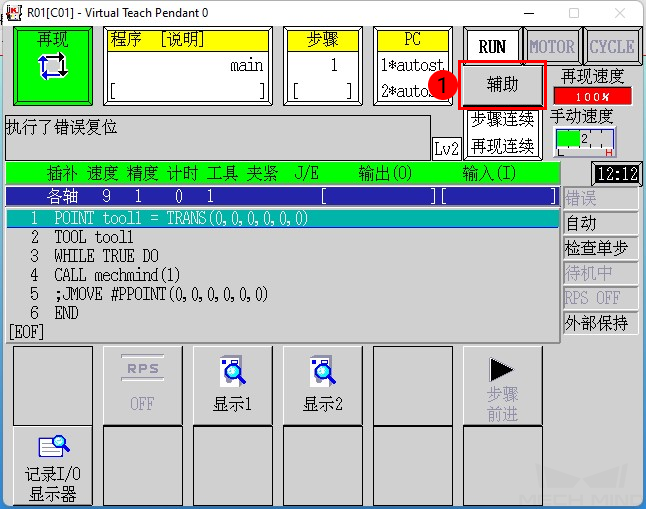
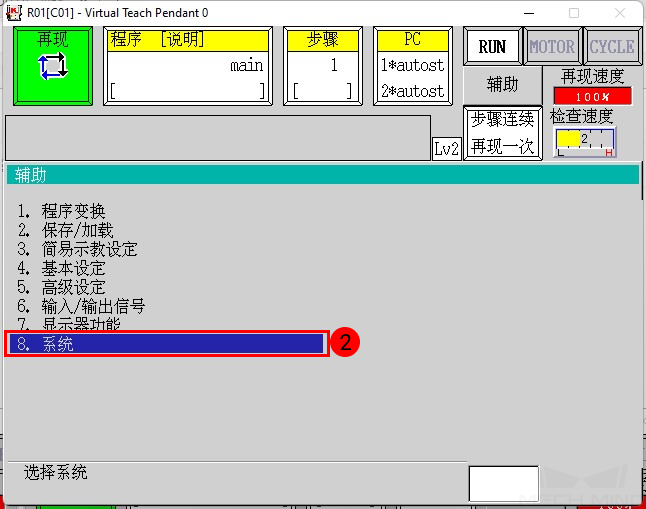
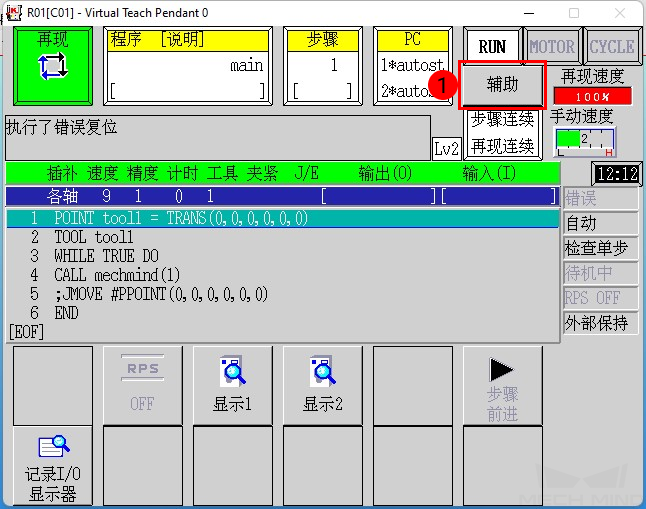
设置机器人网络端口的 IP 地址时,首先单击示教器上的 辅助 按钮,随后依次单击 。
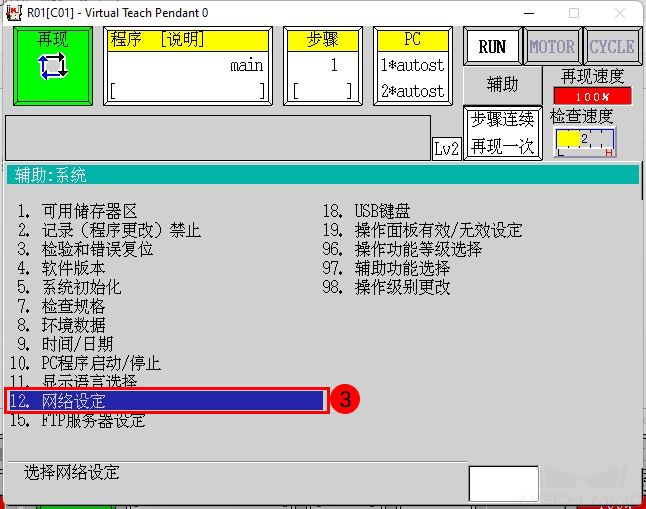
在端口1页面设置机器人网络端口1的 IP 地址和子网掩码(机器人 IP 地址需与工控机网络端口地址位于同一网段)。如果网络中使用网关设备,还需设置网关地址。

IP 地址设置完成后,单击示教器上的 登录 进行确定,然后重启控制柜电源。
烧录文件至机器人中¶
选择待烧录的文件¶
机器人烧录文件存放在 Mech-Center 软件的安装路径下: XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/kawasaki 。
将 mm_control.as 文件复制到 U 盘根目录中,然后将 U 盘插入控制柜面板的 USB 接口。
烧录前的注意事项¶
保存用户程序
提示
如果示教器程序列表中存在用户程序,烧录前需要保存备份。如果示教器中无用户程序,可跳过该步骤。
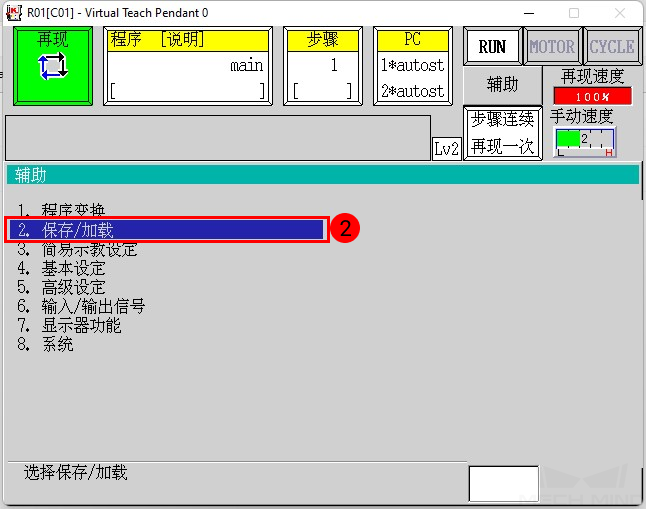
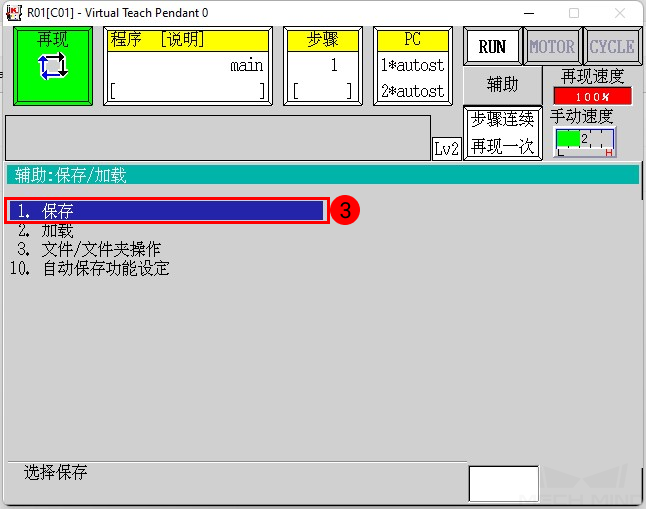
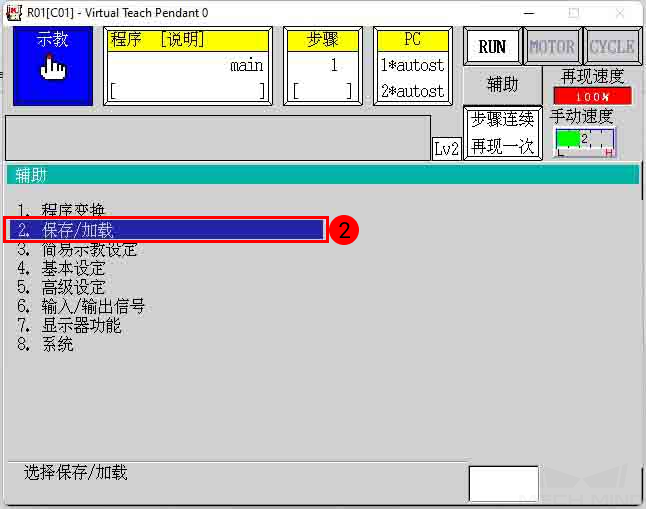
单击 辅助 按钮,然后依次单击 。
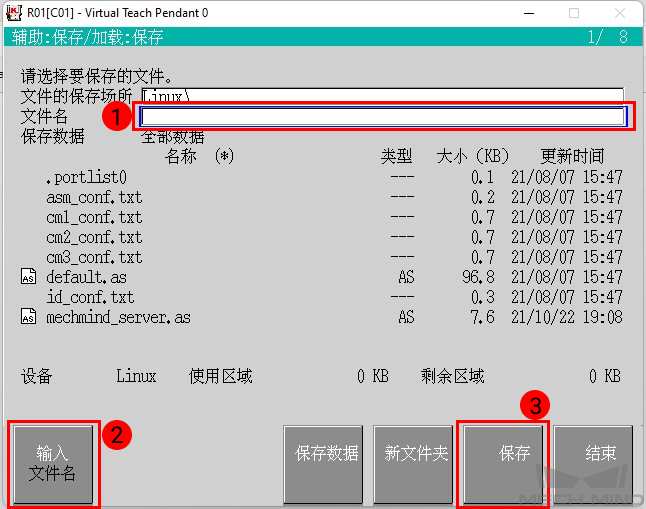
在保存页面,需先单击文件名处,再单击 输入文件名 按钮填写文件名,然后单击 保存 按钮。保存完毕后,按示教器上 R 键返回主页面。
退出机器人的前台程序和 PC 程序
注意
烧录前请退出机器人的前台程序和 PC 程序,以确保烧录成功。
烧录前检查示教器程序窗口和 PC 窗口,确保窗口内无程序登录。如果有程序,请注销。

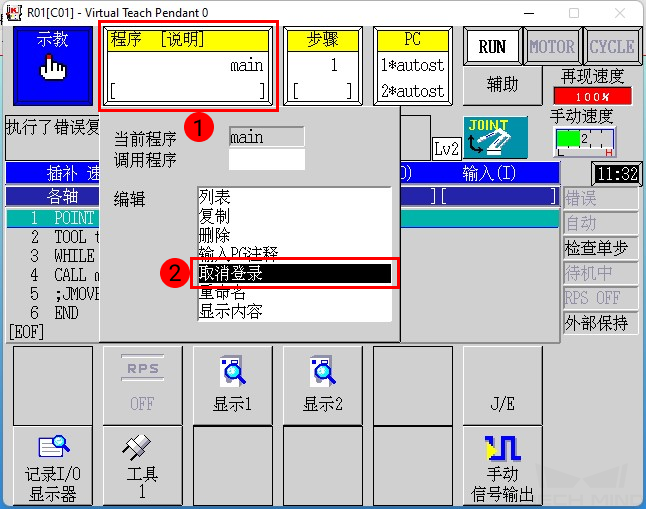
注销前台程序时,需单击程序窗口,然后单击 取消登录 。
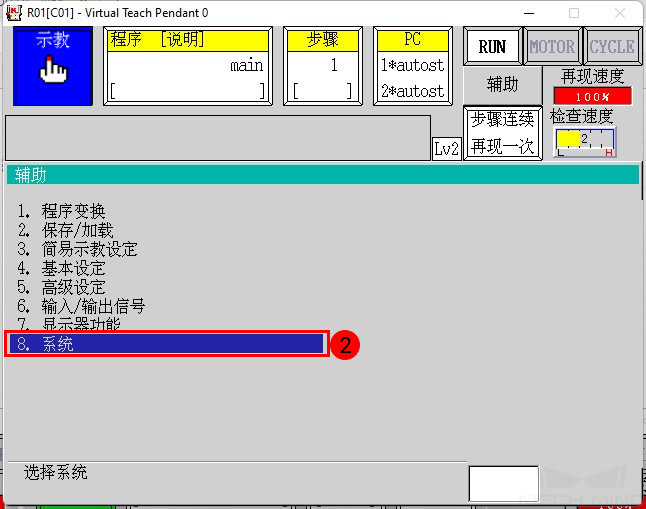
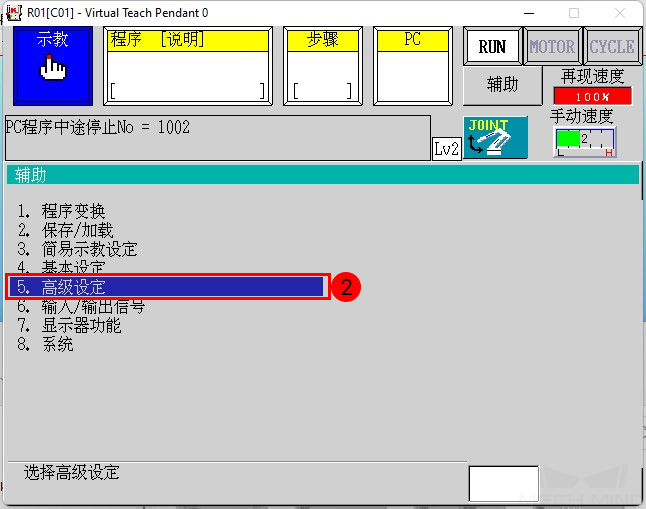
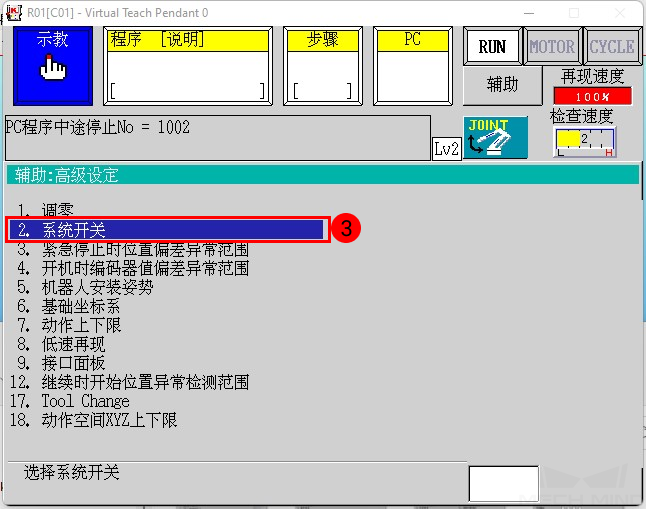
注销 PC 程序时,需先在示教器上单击 辅助 按钮,然后依次单击 。
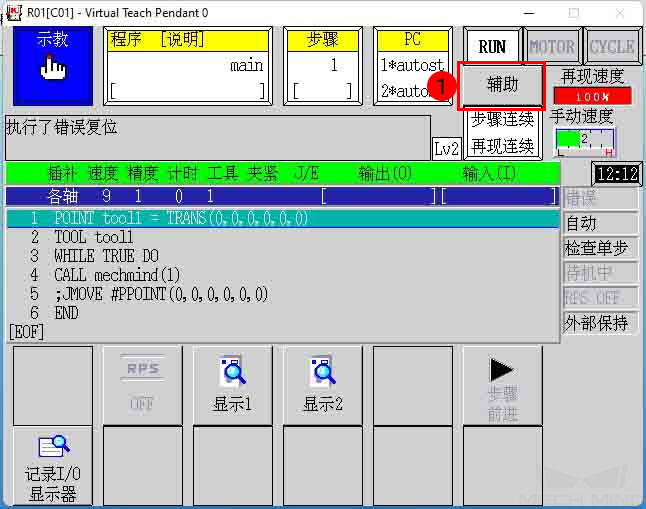
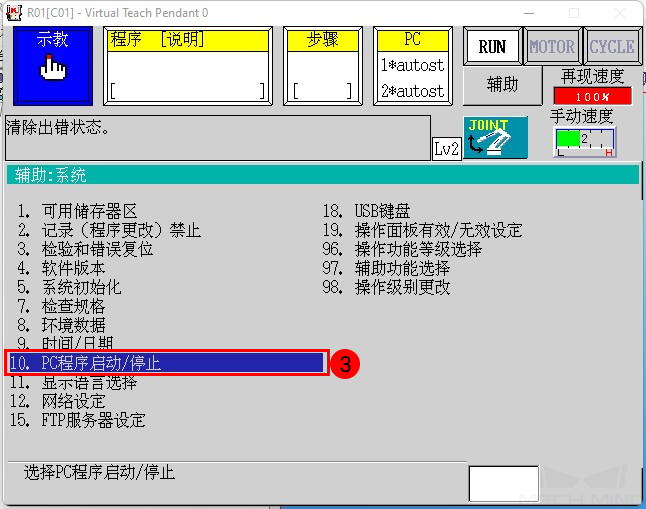
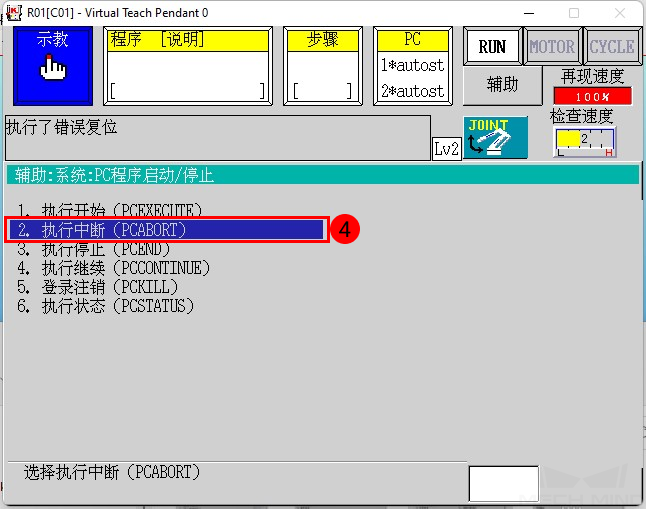
随后按 登录 键中断 PC 程序1,并将 PC 程序号改为2,然后按 登录 键中断 PC 程序2,最后按 R 键返回。

选择 5. 登录注销 后,按 登录 键注销PC程序1,将 PC 程序号改为2,然后按 登录 键注销 PC 程序2,最后按 R 键返回。


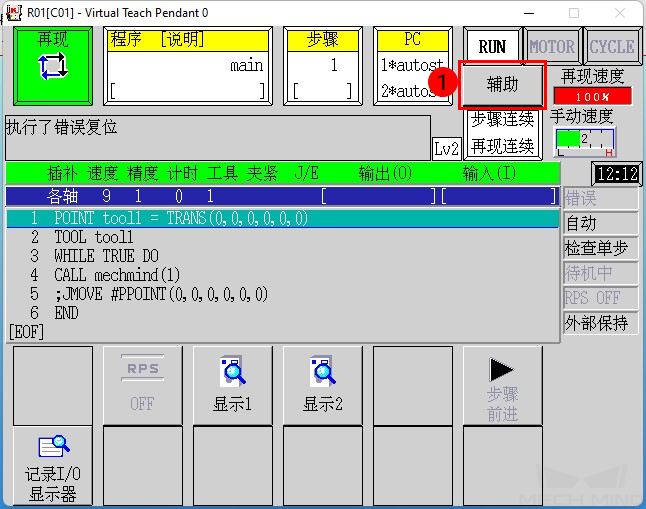
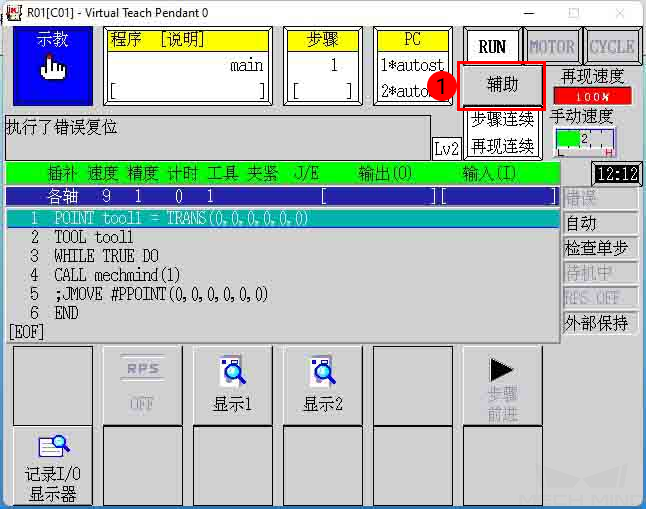
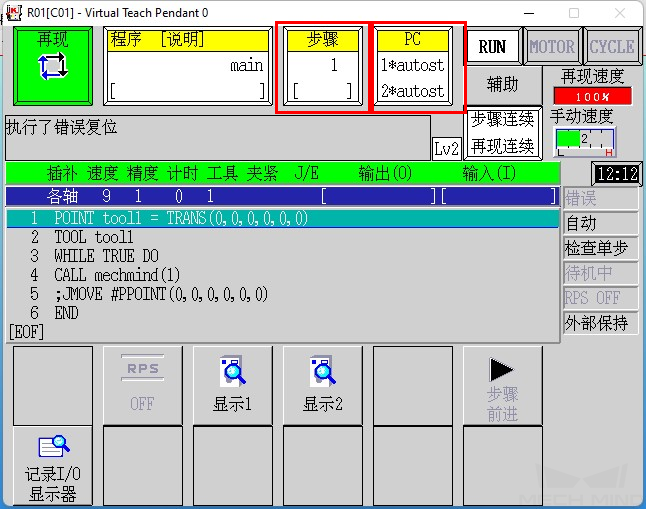
烧录前确认机器人在示教模式,程序窗口和 PC 程序窗口无程序,如下图所示。

注意
确认 PC 窗口中是否仍有程序,如果有,请重复上述步骤,直至 PC 窗口中不再有程序。
程序烧录¶
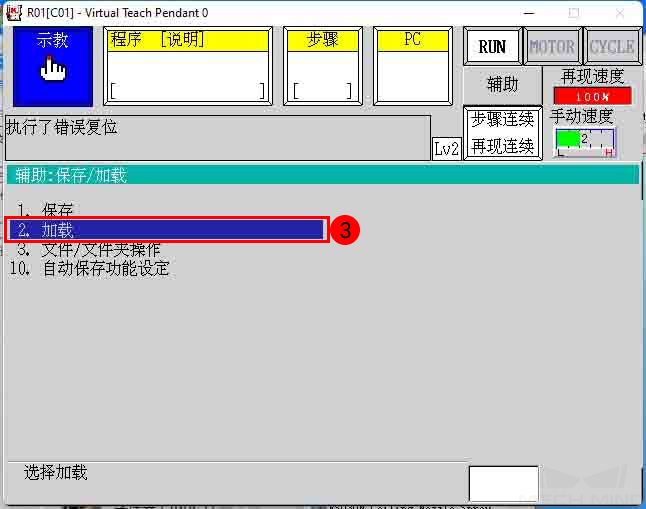
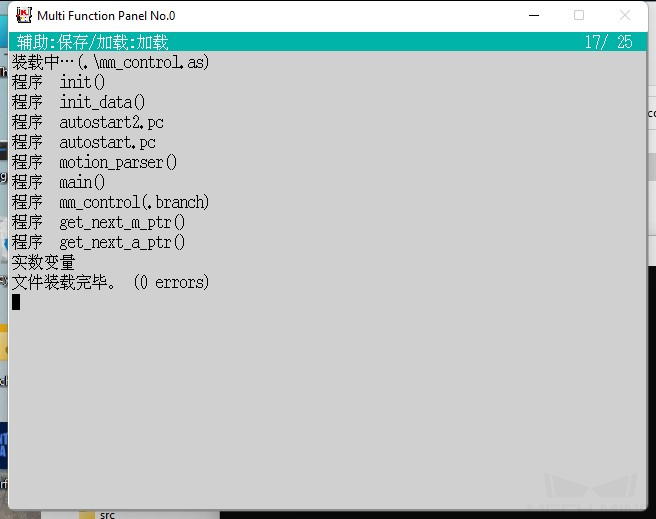
将存有烧录程序的 U 盘插入控制柜的 USB 接口,在示教器上点击 辅助 按钮,选择 ,双击选择程序文件 mm_control.as , 使文件名处显示 mm_control.as ,然后点击 加载 。
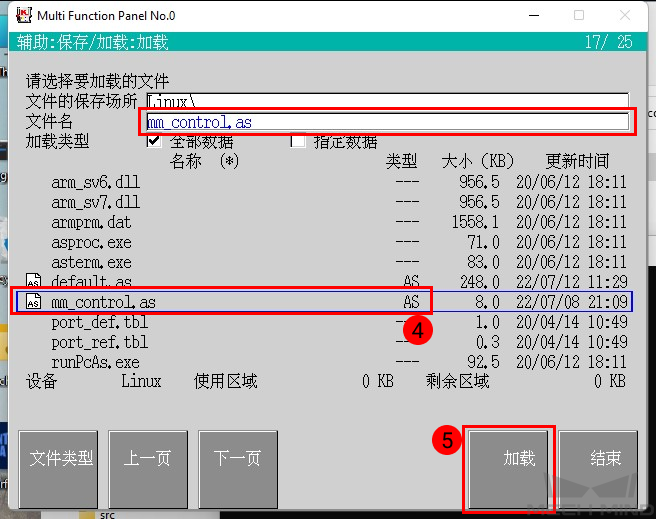
加载完毕,确认无加载错误后,按示教器 R 键退出。
烧录后的操作¶
设置 PC 程序开机自动运行
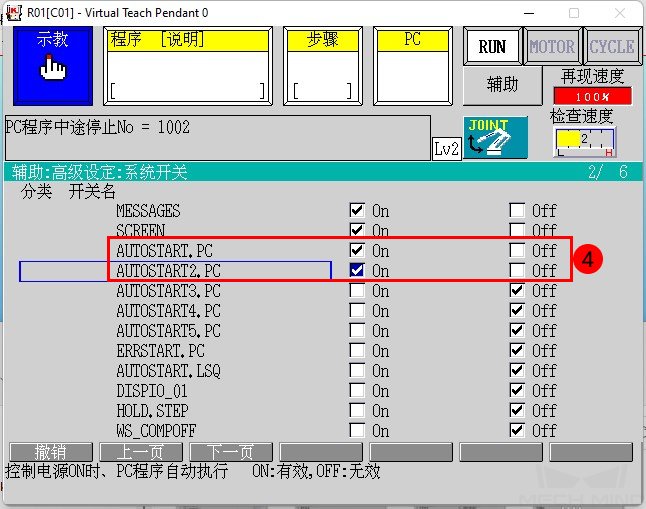
在机器人程序烧录完成后,将 PC 程序设定为开机自动启动。具体步骤为:
示教器单击 辅助 按钮,选择 ,点击 下一页 , 找到 AUTOSTART.PC 和 AUTOSTART2.PC ,触屏勾选为 On ,示教器上按 登录 键保存。
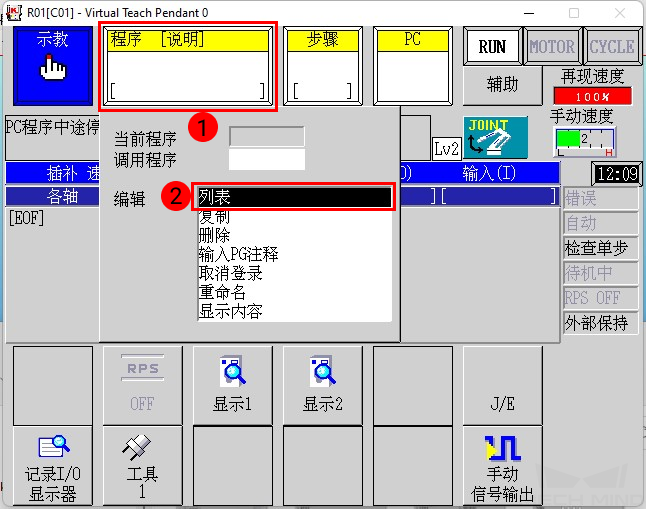
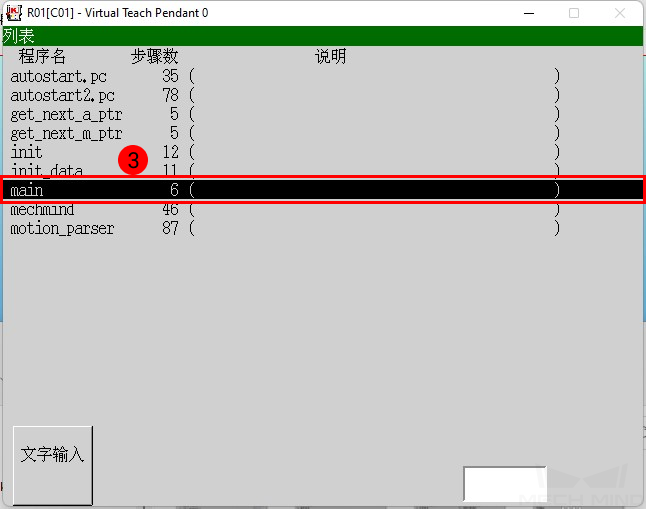
选择前台主程序
点击程序窗口,点击 列表 ,选择 main ,在示教器上按 登录 键进行确认,确认 PC 程序框内没有其他程序。
切换再现模式
将控制柜上的 示教/再现 开关旋转至再现模式,并确认示教器上的示教锁位于关闭位置,此时机器人处于 再现模式 。

然后在触摸屏上把程序运行模式切换到 步骤连续,再现连续 。
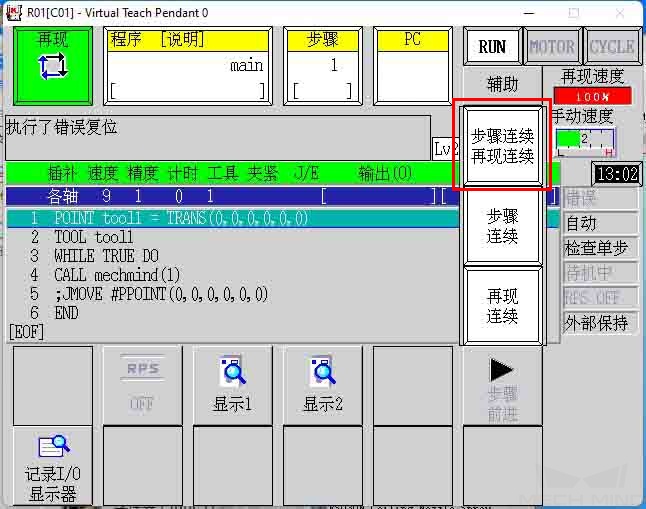
重启控制柜
重启控制柜,显示内容如下图所示。PC 程序前有*号表示运行中。如果运行步骤不是1,请手动修改(点击步骤窗口,输入1)。
测试机器人连接状态¶
检查 Mech-Center 设置并连接机器人¶
请参阅:测试机器人连接状态 。
提示
Kawasaki 机器人与 Mech-Center 软件的通信由两个 PC 程序完成。在两个 PC 程序运行状态下,无需运行前台的主程序,即可连接到 Mech-Center 软件。
运行机器人¶
按住 A 键,并触屏单击 MOTOR 上电。
按住 A 键,并触屏单击 CYCLE 运行机器人。
此时如果 RUN 没有亮起,需按住 A 键,并按示教器上的 暂停/运转 键。
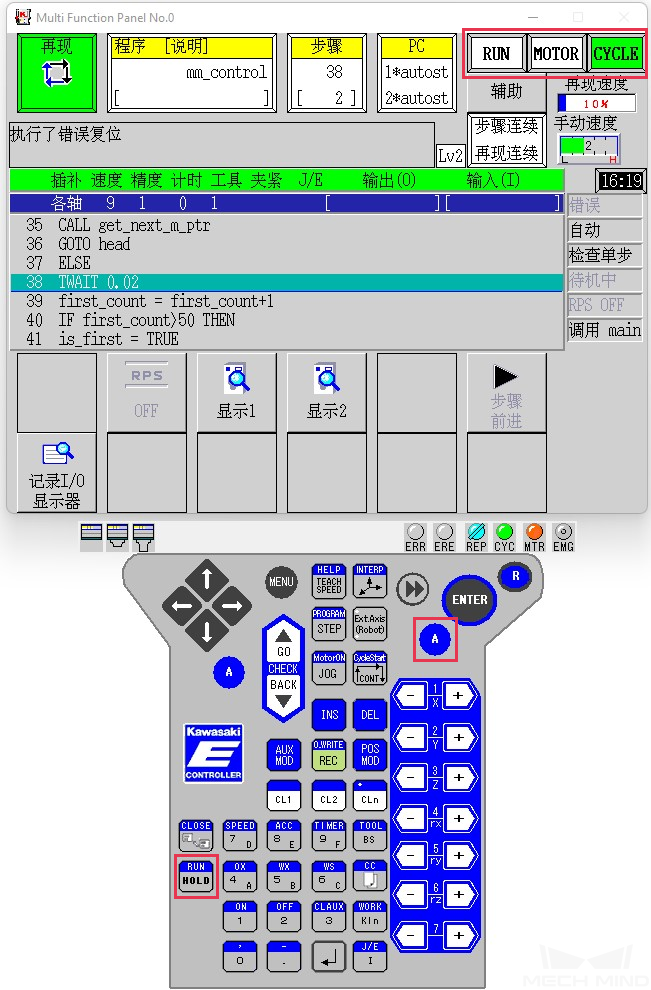
注意
RUN 、 MOTOR 、 CYCLE 全部亮起后,机器人程序成功运行。
将机器人再现速度调到10%,如果机器人有异常运动,请立即按下机器人紧急停止按钮。