测试机器人连接状态¶
在 Mech-Viz 中配置机器人¶
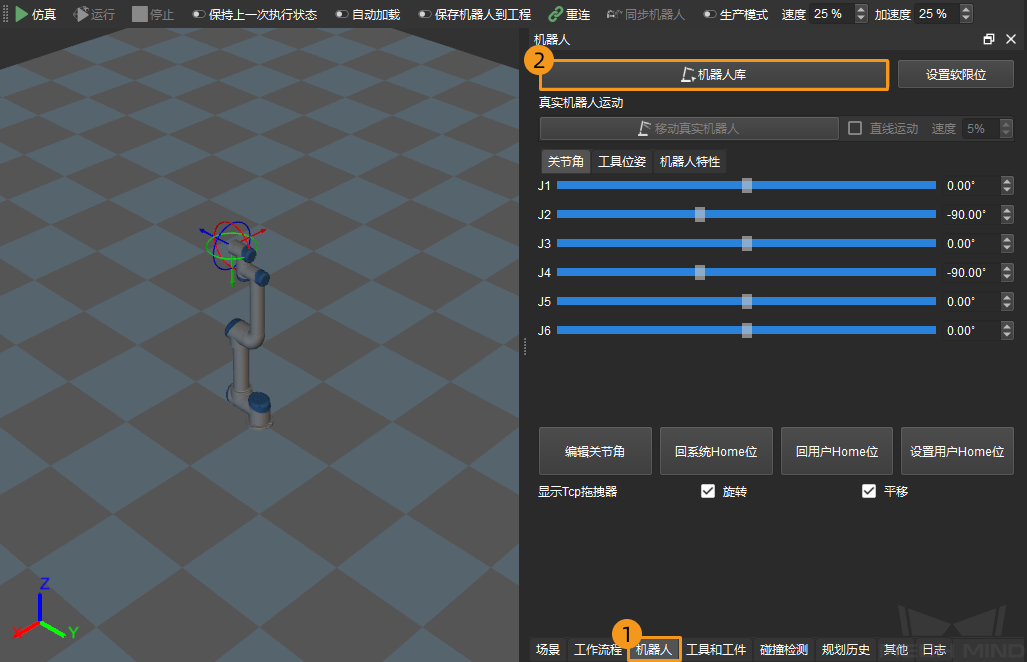
打开 Mech-Viz 软件,单击 机器人 ,然后单击 机器人库 ,选择与真实机器人对应的虚拟机器人。
小技巧
上述详细操作可参考 配置机器人 。
按下键盘上 Ctrl + S ,创建或选择文件夹,以保存工程。
打开工具栏的 自动加载 选项,将速度与加速度调整为 5% 。

检查 Mech-Center 设置¶
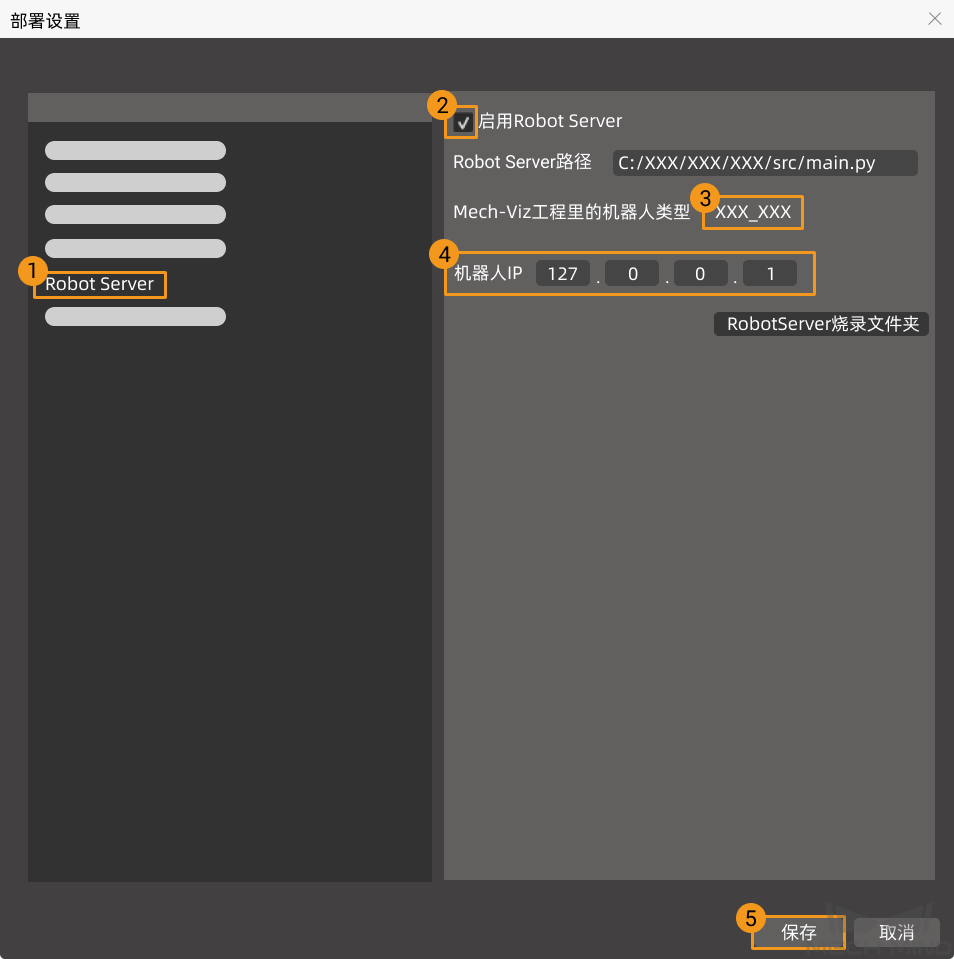
打开 Mech-Center 部署设置,在 Robot Server 选项中,勾选 启用 Robot Server ,确认机器人型号与实际机器人型号相同,然后设置机器人的实际 IP 地址,最后单击 保存 。
连接机器人¶
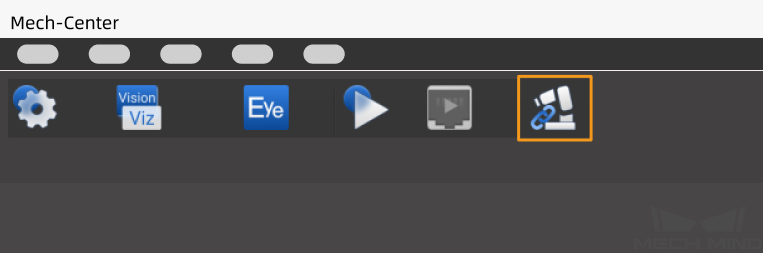
在 Mech-Center 软件中,单击工具栏中的 主控机器人
 。
。
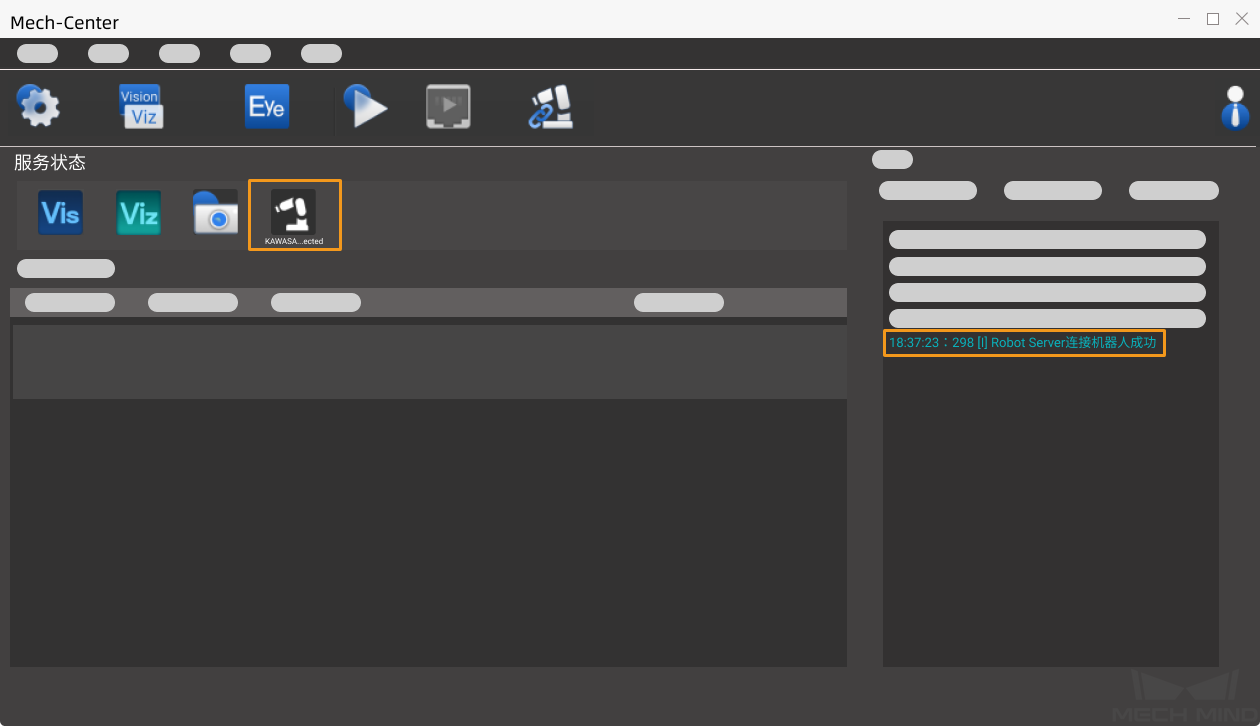
若连接成功,服务状态栏显示机器人图标及其型号,同时在日志栏打印连接机器人成功信息。若连接失败,仔细检查之前的操作是否正确。
移动机器人¶
在 Mech-Viz 软件中,单击选中工具栏中的 同步机器人 ,将虚拟机器人同步成真实机器人的位姿,然后再次单击以取消选中 同步机器人 。

在关节角选项下,微调 J1 关节角角度(例如,将 0° 调整为 3°),虚拟机器人将发生移动。
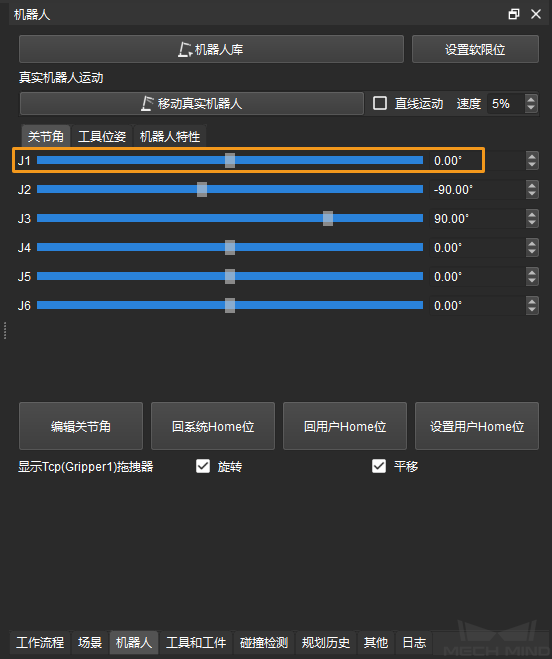
单击 移动真实机器人 ,将观察到真实机器人移动到虚拟机器人的位姿。

注意
在运行机器人时,请确保人员安全。当发生紧急情况时,请按下示教器上的急停按钮!