STAUBLI(史陶比尔)¶
本节介绍如何主控 STAUBLI 机器人,包含以下 3 步:
注解
STAUBLI 机器人主控程序烧录对机器人系统版本无要求。
用户密码:
default:密码为空。
maintenance:密码为 spec_cal。
staubli:密码不对外开放。
烧录文件至机器人中¶
选择烧录文件¶
需要烧录的文件的具体路径为 XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/staubli 。
烧录前的准备¶
在拷贝烧录文件之前需要配置 IO ,在示教器中找到 IO 板,查看 IO 板编号。
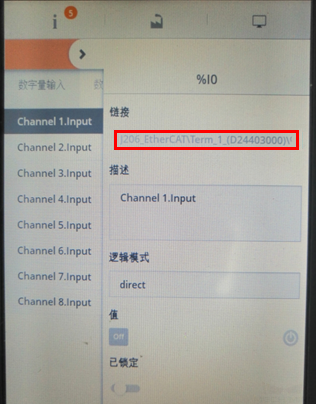
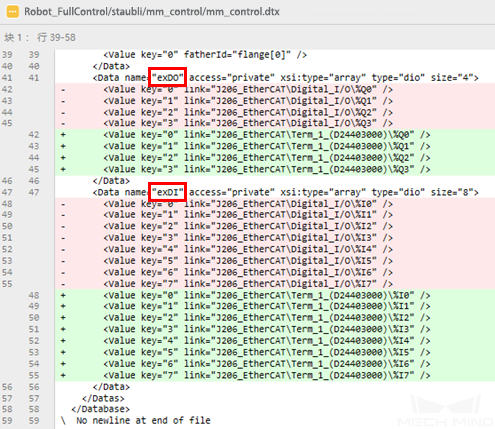
STAUBLI 机器人官方的 etherCAT IO 板有 4 个 DO(exDO)和 8个 DI(exDI),需像下图一样修改 mm_control 文件夹中mm_control.dtx 文件配置 IO ,将下图中的 Digital_I/O 改成 Term_1_(D24403000) 。
程序烧录¶
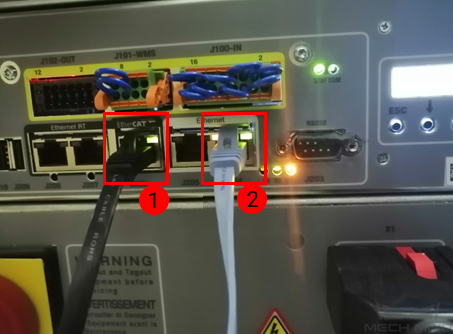
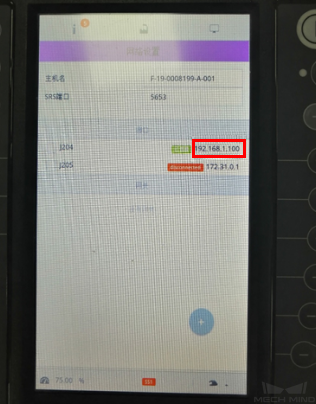
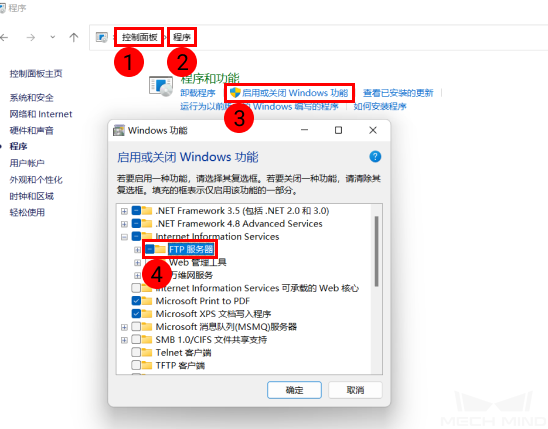
由于机器人通过 ftp 方式拷贝程序,所以首先需使工控机 IP 地址与机器人 IP 地址位于同一网段下,确保工控机可以 ping 通机器人。 同时还要确保工控机开启了 ftp 服务。
其次执行以下程序:
备份并替换下列文件或文件夹:
ftp://192.168.0.254/usr/configs/J206_EtherCAT(IO 相关,该文件是使用的 STAUBLI 官方的 etherCAT IO 板,若使用其他品牌 IO 板需咨询 STAUBLI 技术支持进行配置,然后联系梅卡曼德开发人员修改程序)
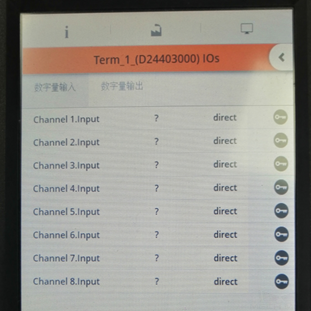
随后重启机器人,检查 IO 板是否配置成功。IO 板配置成功前后如下图所示:

烧录后的操作¶
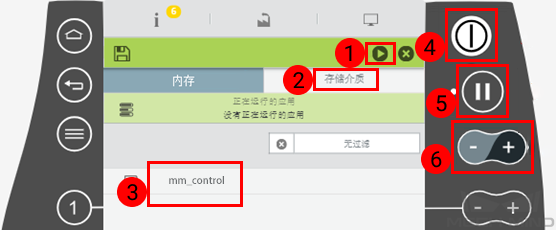
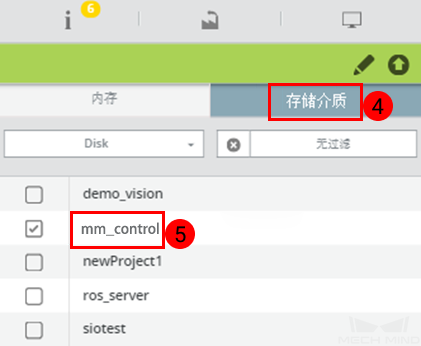
切到 自动模式 并加载程序,然后选择 VAL3 ,在 存储介质 选项下双击 mechmind 。

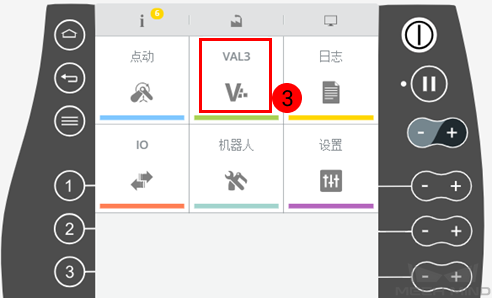
执行下图 ①~③ 步,注意检查有没有报错信息,若有报错信息,先解决报错,基本上都是 IO 配置问题。 然后按 ④ 处按钮上电,⑤处的蓝灯会闪烁,此时按下按钮 ⑤ ,蓝灯变为常亮。⑥ 为调速按钮。